コンタクタ制御およびモータ保護回路
 実行する機能に応じて、さまざまなコンタクタ モータ制御回路があります。
実行する機能に応じて、さまざまなコンタクタ モータ制御回路があります。
図 1a は、不可逆磁気スターターの組み合わせスキームを示しています。その中で、要素の配置は自然界の配置と一致しています。つまり、スターター ボックス内のすべての要素が図の左側にグループ化されています。 「スタート」ボタンと「ストップ」ボタンを備えた押しボタン式ステーション 図の右側に示されています。
ボタンステーションは通常、ボタンステーションから少し離れた場所にあります。 磁気スターター… モーター制御回路の動作原理を理解するには、通常、詳細な(基本的な)図が使用されます(図 1.b)。 SB2 スタート ボタンを押すと、モーター電源回路の 3 つの KM 接点を含む KM コンタクター コイル回路が閉じます。この場合、スタートボタンSB2と並列に接続されたブロック接点KMも閉じる。これにより、SB2 ボタンを放したときに KM コイルに通電できるようになります。
SB1 ボタンを押すとモーターが停止し、コイルがオフして電源 (主) 接点と補助接点が解放されます。 SB1 ボタンを放すと、コイル KM の回路は非通電になります。エンジンを再始動するには、もう一度SB2ボタンを押します。
この回路は、いわゆるゼロ保護も提供します。つまり、主電源電圧がなくなるか、公称値の 50 ~ 60% に低下すると、KM コイルは KM 電源接点を保持できなくなり、モーターがオフになります。電圧が現れたり、公称値に近い値まで増加したりしても、磁気スターターは自発的に作動しません。オンにするには、もう一度スタートボタンを押す必要があります。
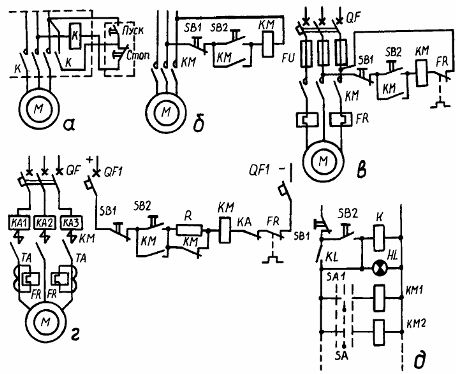
米。 1. モーターの制御および保護スキーム: a — 組み合わせたスキーム、および b — 不可逆磁気スターターの詳細なスキーム。 c - ヒューズとサーマルリレーによるエンジン保護。 d — 強力なエンジン制御ステーションの図。 d — 中間リレーからのゼロ保護
長時間の過負荷時に巻線の過熱からモーターを保護します。 サーマルリレー FR、および大きな過負荷または短絡に対する保護はヒューズ FU または サーキットブレーカー QF (図 1、c)。長時間の過負荷から保護するために、2 つのサーマル リレーが使用されます。1 つのリレーでは、ヒューズが切れた場合に、このリレーの発熱体が直列に接続され、モーターが単相ネットワークに接続され、彼らは保護されません。これらのリレーの遮断接点はスターター コイルと直列に接続されています。そのうちの 1 つが開くと、SB1 ボタンが押されたときと同様に、KM コイルへの通電が遮断され、モーターが停止します。
高出力モーター制御ステーションを図に示します。 1、d. 短絡保護は過負荷リレー KA1 ~ KA3 によって提供され、過負荷保護は変流器を介して接続されたサーマル リレー FR によって提供されます。 3 極コンタクタのコイルには直流電流が供給されます。コンタクタコイルが回路に組み込まれた後、コンタクタコイルの電流を減らすために、開いた接点KMによって事前に短絡されていた追加の抵抗Rが導入されます。
複数のコントローラ、スイッチ、またはその他のデバイスを備えた手動制御回路では、中性点保護を提供するために中間リレーが使用されます。 (図 1、e) 制御回路に電圧を印加するには、ボタン SB2 を押して、閉接点 K を含む中間リレー K と信号ランプ HL をオンにし、制御回路内の電圧の存在を示します。 。 SB2 ボタンを放すと、リレー コイルがブロックされ、SM1 コントローラー、SM パケット スイッチなどの回路が遮断されます。そして、コンタクタ KM1、KM2 などのコイルが通電されます。
検討されている方式では、モーターの連続動作にはセルフロック接点が必要です。実際には、昇降機などでは、スタートボタンが押されたときにのみエンジンを作動させる必要があることがよくあります。この場合、制御回路には停止ボタンがありません (図 2、a)。場合によっては、ドライブを 2 つのモードで確実に動作させる必要があります。つまり、マシンのセットアップ時に短時間オンにするか、長期間オンにする必要があります。次に、ボタン SB2 (図 2.b) を短く押すと、コンタクタ KM のコイルがオンになり、KM のセルフロック接点が閉じます。一方、ボタン SB2 を放すとモータが作動します。 。
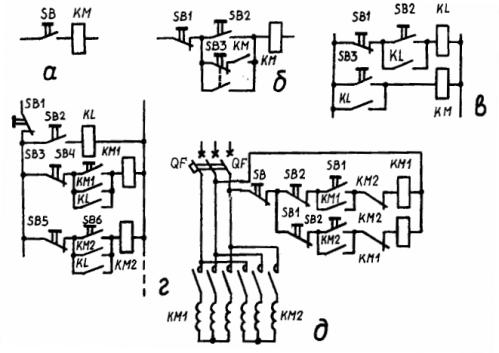
米。 2. 非同期モーターの制御回路の種類: a — ジョギング モード。 b と c — 長時間の仕事やジョギング中。 d — 複数のエンジンを同時に組み込む。 d — 2 速モーターの無段階始動
モーター制御モードの場合、SB3 ボタンを押すと、その閉接点がコンタクタ KM のコイルをオンにし、開接点がコンタクタのセルフロック回路を遮断します。この回路の欠点は、KM ブロックの接点が開く前に SB3 ボタンの開いた接点が閉じる可能性があり、モーターがオフにならないことです。図に示す回路。図2のfにはこの欠陥はない。
連続運転する場合は、SB2 ボタンを押すと中間リレー K がオンになります。接点 K の 1 つがコンタクタ KM のコイルをオンにし、同時にもう 1 つが SB2 ボタンをブロックして、スタート ボタンでエンジンの動作を停止します。解放されました。操作を開始するには、SB3 ボタンを必要な時間押し続けます。
図2dは、中間リレーを使用して1つのスタートボタンから複数のモーターを同時に始動するスキームを示しています...ボタンSB2がリレーKをオンにし、リレーKの閉接点が同時にコンタクターKM1、KM2などのコイルをオンにします。 SB1 ボタンですべてのモーターを同時に停止します。各モーターを個別にオン/オフするには、ボタン SB3、SB4、および SB5、SB6 などをそれぞれ使用します。
図2に示す2速2巻線かご型ロータモータの無段始動図を示します。 2、e. エンジンを最初の速度で始動するには、ボタン SB1 を使用し、2 番目の速度 - SB2 を使用します。両方のボタンは機械的に連動しており、エンジンが同時に 2 つの速度に切り替わるのを防ぎます。
スターター回路も電気的にブロックされます。したがって、たとえばコイル KM1 が作動すると、開放接点がコイル KM2 の回路を遮断し、コイル KM2 が含まれる可能性を排除します。 2 速に切り替えるには、コイル KM1 の回路が切断されてオフになっている間にボタン SB2 を押す必要があります。 KM2回路のコイルに電力が供給され、2速でモーターが回転します。
非同期モーターの逆制御は、2 つのコンタクターを使用して実行されます (図 3、a)。
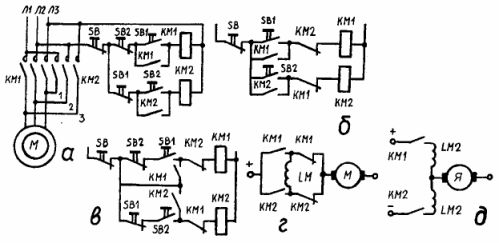
イチジク。 3. エンジン制御方式: a — 機械的ブロックを備えた可逆磁気スターター。 b — 電気的遮断と同じ。 c — オプション a と b の組み合わせ。 d および e — 低電力 DC モーターの始動および逆転
コンタクタ KM1 はモータを正方向に接続するために使用され、KM2 は逆方向に使用されます。短絡につながる 2 つのコンタクタの偶発的な同時オンを防ぐために、この回路ではボタン SB1 と SB2 の 2 つの遮断接点による相互機械的ブロックを使用しています (図 3、a を参照)。ボタン SB1 を押すとオンになります。コイル KM1 の回路を遮断し、コイル回路 KM2 を切断します。
SB1 ボタンと SB2 ボタンを同時に押すと、コイル KM1 と KM2 の回路が切断され、どのコンタクタもオンになりません。遮断は、それぞれコイルKM1およびKM2の回路に含まれる2つの遮断接点KM2およびKM1によって実行されます(図3、b)。この方式でエンジンをリバースするには、まず SB ボタンを押す必要があります。
図の回路です。図 3 の c は、前の 2 つの回路を組み合わせたものです。つまり、二重ブロッキングがあります。SBIボタンはコンタクタKM1をオンにし、ボタンSB1の接点とブロックKM1の接点が同時に開くことによりコンタクタKM2のコイルの回路が遮断される。
図 3 の d と e は、低電力の逐次励起モーターを起動および反転するための最も単純なスキームを示しています。このようなモーターは加減抵抗器を起動せずにネットワークに接続されます。図の図によると。図 3、d では、直列励磁によるモーターの始動と逆転は 2 つの中間リレーによって実行されます。 LM フィールド コイルの電流の方向を反転すると、モーターが反転します。反対方向の磁束を生成する 2 つの直列界磁巻線を備えたモーターでは、スイッチングおよび反転回路には 2 つの接点しかありません (図 3、e を参照)。
検討した制御スキームからわかるように、かご型ローター非同期モーターの始動と逆転のプロセスを自動化するのが最も簡単です。この場合、始動時のすべての制御はモーターを電力ネットワークに接続することに減り、停止時にはネットワークから切断されます。
より複雑なのは、ローターの相巻線を備えた誘導モーター、出力が増加した誘導かご形モーター、中出力および高出力の DC モーター、ステップスタートを備えた多速度誘導モーターなどの起動、停止、および停止の自動化です。同期モーターとして。これらのエンジンは制御されています 時間の関数として, スピード と 現在.
上記以外にもエンジン制御や、 パス原則に従って、エンジンが始動し、作業体が宇宙内の特定の位置に到達すると減速します。このような機能を実行するシステムは、出力値と入力値の間にフィードバックがないため、開ループ システムと呼ばれます。