時間の関数としてのモーター制御回路
 このタイプの制御は、速度や電流を監視せずに電気モーターの始動プロセスを自動化する場合など、電気モーターの電気回路内のすべてのスイッチングが特定の瞬間に行われる場合に使用されます。間隔の長さは決定され、タイムリレー設定によって調整できます。
このタイプの制御は、速度や電流を監視せずに電気モーターの始動プロセスを自動化する場合など、電気モーターの電気回路内のすべてのスイッチングが特定の瞬間に行われる場合に使用されます。間隔の長さは決定され、タイムリレー設定によって調整できます。
時間制御は、大量生産の電磁式および電子式時間リレーの簡単さと信頼性により、業界で最も普及しました。
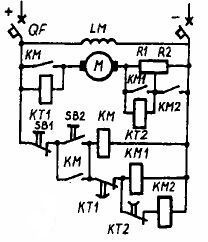
ということで、図から。図 1、a、b から、ラインコンタクタの接点 K を閉じることにより、レオスタットの抵抗全体が電機子回路に含まれ、R1 + R2 + R3 に等しく、始動抵抗セクションも含まれることがわかります。特定のエンジン速度 n1、n2、n3 で、特定の時間間隔 t1、t2、t3 で、突入電流が設定値 I2 まで低下したときに発生する可能性があります。時間間隔は、後続の抵抗の短絡のたびにモーター電流が許容 I1 を超えないように選択されます。
モーターが n = 0 から n1 まで加速すると、後方起電力の増加により電流は I2 まで減少します。時間間隔 t1 の後、接点 K1 が閉じ、抵抗 R1 が分流され、加減抵抗器の抵抗 R2 + R3 が減少し、I1 への電流が新たに増加します。始動の終了時に、モーターは定格速度まで加速し、始動レオスタットは完全に取り外されます。
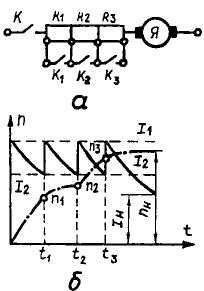
米。 1. 時間の関数としてのモーター制御回路: a — DC モーター始動加減抵抗器、b — 始動図
いくつかのモーター制御回路を時間の関数として考えてみましょう。
巻線ロータを備えた誘導電動機の時間依存制御 (図 2) では、始動加減抵抗器の個々のステップを短絡するのに必要な時間遅延は、振り子の数と同じ数の振り子式時間リレーによって提供されます。ステップ。このスキームは次のように機能します。
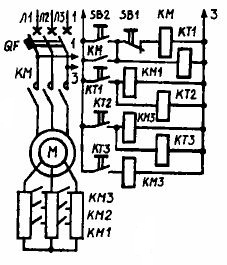
米。 2. 巻線型誘導電動機の時間の関数としての制御回路
をクリックすると ボタン SB1 は、モータのステータを主電源に接続する KM ライン上のコンタクタ コイルに電力を受け取ります。同時に、出力可変抵抗器が完全に導入されます。コンタクタとともにタイムリレー KT1 がオンになり、一定時間後にコンタクタ KM1 のコイル回路の接点が閉じます。
コンタクタが作動して加減抵抗器の最初のセクションを閉じ、ローターを始動します。同時にタイムリレー KT2 がオンし、遅れて接点が閉じ、コイル KM2 とタイムリレー KTZ がオンします。コンタクタ KM2 の接点が始動加減抵抗器の第 2 段 KM2 を短絡します。さらに、時間遅延とともに、KTZ リレーの接点がトリガーされ、KMZ 巻線がオンになり、KMZ 始動加減抵抗器の最終段が短絡され、モーターは今後も動作し続けます。リスローター。
SB ボタンを押すとモーターが停止し、過負荷の場合は QF スイッチを放すとモーターがオフになります。これにより、ラインコンタクタ、その補助接点 KM、およびすべての加速コンタクタと非時間遅延時間リレーがオフになります。チェーンは次のサイクルの準備が整いました。
固定子巻線をスターからデルタに切り替えて、出力を増加させて誘導モーターのアイドル速度を開始するには、図の図を使用できます。 3. この回路のスイッチングは時間の関数として自動的に行われ、ボタン SB2 を押すと、固定子巻線がコンタクタ KM によってネットワークに接続されます。同時に、タイムリレー KT とコイル KY がネットワークに接続され、電源回路の 3 つの接点を使用して固定子巻線をスターに接続します。
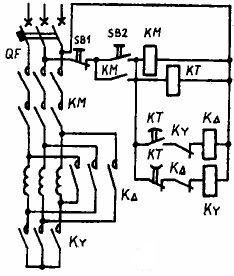
米。 3. Y から Δ への切り替えによる誘導モーターの時間の関数としての制御回路
モーターは低下した電圧で始動し、加速します。所定の時間間隔の後、KT リレーは KY コンタクタをオフにし、固定子巻線をデルタに接続する KΔ コンタクタのコイルをオンにします。コイル KΔ の回路には補助接点 KY があるため、コンタクタ KMY が閉じる前にコンタクタ KΔ が閉じることはありません。
多速度誘導モーターの段階的始動はより経済的であり、時間の関数として実行されます。単一巻線を備えた 2 速モーターのステップバイステップ始動の例を考えてみましょう (図 4)。固定子巻線は 2 倍の速度でデルタ巻線からダブルスター巻線に変わります。
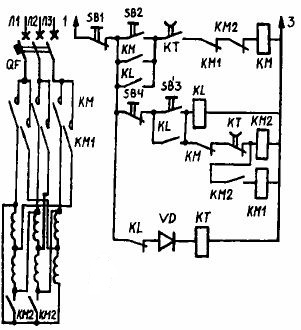
米。 4. 誘導モータのステップ開始時間の関数としての制御回路
モーターは、第 1 速度段に対してはコンタクタ KM によって、第 2 速度段に対してはコンタクタ KM2 および KM1 によってスイッチがオンになります。モーターを 1 速までオンにするには、ボタン SB2 を押すと、主回路のコンタクタ KM のコイルとその電源接点 KM がオンになります。デルタ結線固定子巻線はネットワークに接続されます。タイムリレー KT のコイルが通電され、その閉接点 (コイル KM の回路内) が閉じます。
 第2の回転速度でのエンジンの段階的な始動は、中間リレーKを使用して実行され、その回路はスタートボタンSB3によって閉じられる。 K 閉接点は 2 つのスタート ボタンをバイパスし、K 開接点は KT 時間リレーの電源を切ります。コイル KM の回路内の閉接点 KT は復帰遅延とともにオフになります。これにより、始動の最初の期間でコイル KM が閉になり、モーターが第 1 速度でオンになります。
第2の回転速度でのエンジンの段階的な始動は、中間リレーKを使用して実行され、その回路はスタートボタンSB3によって閉じられる。 K 閉接点は 2 つのスタート ボタンをバイパスし、K 開接点は KT 時間リレーの電源を切ります。コイル KM の回路内の閉接点 KT は復帰遅延とともにオフになります。これにより、始動の最初の期間でコイル KM が閉になり、モーターが第 1 速度でオンになります。
コイルKM2とKM1の回路のKMブロックの接点が開きます。これらのコイルは開接点 KT からも切り離されており、復帰が遅れます。一定の時間が経過すると、閉接点KTがコイルKMをオフにし、その開接点が第2回転速度KM1およびKM2の接触器のコイルをオンにする。供給回路の主接点は固定子巻線をダブルスターに切り替え、主電源に接続します。
したがって、エンジンは最初に 1 速まで加速し、その後自動的に 2 速に切り替わります。固定子巻線のダブルスターへの予備接続とその後のネットワークへの組み込みは、まず電源の 2 つの閉接点 KM2 をオンにし、次に 3 つの主接点 KM1 をオンにすることによって実行されることに注意してください。このようなスイッチングシーケンスは、コイルKM1が閉鎖ブロックKM2の接点を介して電圧に接続されるという事実によって達成されます。エンジンは、図上で文字 SB1 のマークが付いている«Stop»ボタンを押すと停止します。
図では。図5は、並列励起DCモータの自動始動を時間の関数として示す図である。 QF サーキットブレーカーを閉じると、モーターの始動準備が整います。電流は、タイムリレー KT1 の巻線、モーター M の電機子、および 2 段の始動加減抵抗器 R1 + R2 で構成される回路を流れます。
米。 5. 励起された DC モーターの時間の関数としての制御回路
リレー KT1 のコイルの抵抗が高いため、この回路の電流は非常に小さく、モーターには影響しませんが、リレー自体がトリガーされ、コンタクタ KM1 の回路内の開接点が開きます。抵抗R1と並列に接続された2回目リレーKT2のコイルには、オンできないほど微小な電流が分流される。モータのLM界磁巻線もONします。
SB2 ボタンを押すとモータが起動し、同時にモータの電機子回路内のコンタクタ KM とその接点がオンします。大きな始動電流は、2 つの加減抵抗器段 R1 および R2 によって制限されます。この電流の一部は KT2 リレーのコイルに分岐され、作動すると KM2 コンタクタ回路の KT2 接点が開きます。電機子回路Mが閉じると同時に、コンタクタKMの動作接点がリレーKT1のコイルを短絡する。
一定の時間が経過した後、リレーが復帰すると、KT1 は KM1 コンタクタ回路の KT1 接点を閉じます。この接触器は動作接点 KM1 を備えており、始動加減抵抗器の第 1 段 R1 とタイムリレー KT2 の巻線を短絡します。復帰遅延により、その作動接点 KT2 がコンタクタ KM2 をオンにし、コンタクタ KM2 がその作動接点 KM2 とともに始動加減抵抗器の第 2 段 R2 を短絡します。これでエンジンの始動は完了です。
SB1 ボタンが押されると、KM コンタクタがトリップし、電機子回路の主接点が切断されます。アーマチュアは通電されたままですが、リレーコイルKT1と直列に接続されているため、小さな電流が流れます。リレー KT1 が動作し、コンタクタ KM1 と KM2 の回路の接点が開き、コンタクタがオフになって接点が開き、抵抗 R1 と R2 が短絡します。モーターは停止しますが、界磁巻線は主電源に接続されたままであるため、モーターは次の始動に備えます。エンジンの完全な停止は、自動入力スイッチ BB をオフにすることによって行われます。
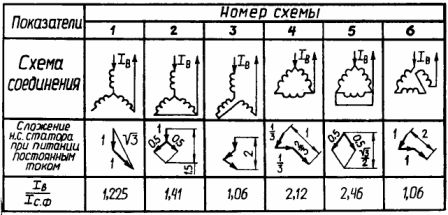
モーターの動的ブレーキも時間の関数として実行されます。誘導電動機などのダイナミック ブレーキの場合、固定子巻線は交流ネットワークから切り離され、表 1 に示す方式の 1 つに従って直流電源に接続されます。林業および木工産業では、特殊な半導体整流器から直流電流が得られます。この場合、特別な直流電源は必要ありません。
いずれかの方式 (表 1 を参照) に従って固定子巻線がオンになると、整流器への巻線内に定常磁界が生成されます。静止磁界では、モーターのローターは慣性によって回転し続けます。この場合、モーターの回転子に交流 EMF と交流電流が発生し、交流磁場が励起されます。ステーターの静止磁界と相互作用する際のローターの磁界の変化により、制動トルクが生成されます。この場合、ローターとドライブから蓄積された運動エネルギーはローター回路で電気エネルギーに変換され、電気エネルギーは熱に変換されます。
熱エネルギーはローター回路から環境に放散されます。ローターで発生した熱によりモーターが加熱されます。放出される熱の量は、固定子巻線に直流電流が供給されている場合、その電流に依存します。直流電流が供給されたときに固定子巻線をオンにするために採用された方式に応じて、固定子の電流と相電流の比率は異なります。さまざまなスイッチング方式におけるこれらの電流の比率を表に示します。 1
誘導電動機のダイナミックブレーキ回路を図に示します。 6.
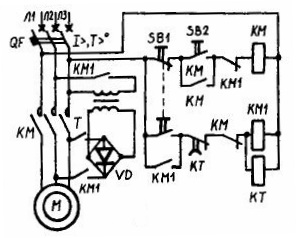
米。 6. 誘導電動機の発電制動の仕組み
スタートボタン SB1 を押すと、KM ラインコンタクタがモータを AC ネットワークに接続し、その閉ブロック接点が KM コイルを自己給電に切り替えます。開放接点 KM は、ブレーキ接触器 KM1 とタイムリレー KT の供給回路を切断します。 SB ボタンを押すと、KM ラインコンタクタが非通電となり、KM1 コンタクタのコイル回路が通電されます。
コンタクタ KM1 は変圧器 T と整流器 V の回路にその接点 KM1 を含み、その結果として固定子巻線に直流電流が供給されます。ラインコンタクタのランダムな独立スイッチングを防ぐために、ブロック KM1 の開放接点はそのコイル KM と直列に接続され、ブレーキコンタクタと同時にタイムリレー KT がオンになり、その開接点 KT が作動するように構成されています。一定時間後にコイル KM1 とタイムリレーをオフにします。時間リレー設定 KT は、リレー作動時間 tkt がモータ減速時間 tT と正しいコンタクタ KM1 トリップ時間の合計に等しくなるように選択されます。