速度の関数としてのモーター制御回路
 モーター制御では、速度はモーターローター速度の関数として監視され、変化に応じて対応する制御要素に影響を与えます。
モーター制御では、速度はモーターローター速度の関数として監視され、変化に応じて対応する制御要素に影響を与えます。
速度制御リレーまたは小型測定発電機は、モーター始動制御回路に使用できます。ただし、設計が複雑で、コストが高く、信頼性が不十分であるため、これらの目的で使用されることはほとんどありません。したがって、エンジン回転数は間接的な方法で制御されます。非同期および同期モーターでは、回転周波数は回転子電流の起電力と周波数によって制御され、直流モーターでは電機子起電力によって制御されます。
図では。図1、aおよびbは、回転周波数に応じて、また起動時からのEMFおよび電機子電圧に応じて並列励磁DCモータを自動起動する方式を示す。回転数の制御は、回転数に比例して変化するモータの起電力を測定することで行われます。
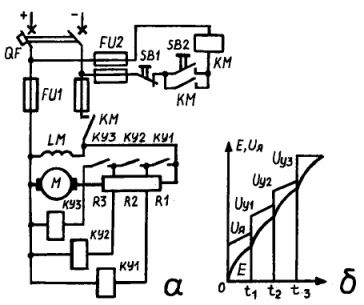
米。 1.速度の関数としての制御回路: a および b — 並列励磁 DC モーターの回路と起動図
EMF はエンジン速度に比例するため、始動レオスタットの各段の自動入力は、加速コンタクタ KM1、KM2、KMZ の作動電圧の一定の大きさで実行され、それぞれが一定の引き込み量に設定されます。価値。スターターを押すことで ボタン SB2 は KM ラインコンタクタをオンにします。すべての抵抗 R1、R2、R3 は電機子巻線と直列に接続され、電流を制限します。
ある速度 n1 では、コンタクタ K1 のコイルの電圧 Uy1 は次のようになります。

ここで、これはマシンの係数です。
Uy1 がプルダウン電圧と等しくなる場合、コンタクタ KM1 が動作し、抵抗 R1 を短絡します。 n2 と n3 が回転するまで回転速度がさらに増加すると、コンタクタ K2 のコイルの電圧が増加し、値が短絡します。


この場合、コンタクタ K2 と短絡回路が直列に動作し、抵抗 R2 と R3 を短絡します。抵抗 R3 を短絡すると始動プロセスが完了し、モーターは長時間回転できます。
誘導電動機の回転子回路の EMF は滑りに比例します。つまり、E2s = E2s です。ここで、E2 は静止ローターの起電力です。
スリップが低いほど、EMF は低くなります。つまり、モーターのローター速度は高くなります。巻線ローターを使用した AC モーターの始動を制御するには、ローター回路内の EMF の値を制御するリレーが使用されます。始動抵抗を短絡する対応するデバイス (リレー、コンタクタ) は、これらの電圧に調整されます。
巻線型誘導電動機および同期電動機の制御では、速度の関数として周波数法を使用することもできます。この方法は、ステータ磁界n0およびロータn2の回転周波数に対するロータ電流f2の周波数の既知の依存性に基づいている。
各ローター速度は特定の f2 値に対応するため、その周波数に設定されモーターローター回路に接続されたリレーがコンタクタコイル回路に作用します。コンタクタは、指定された速度で抵抗段を短絡します。
速度に応じて対向モーターによるブレーキがかかります スピードコントロールリレー SR。図2のa、bは非同期モータの対抗停止例を示しています。
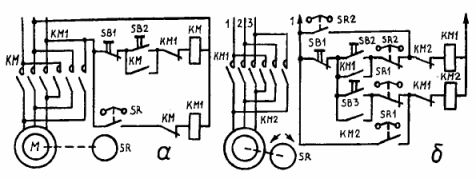
米。 2. 対抗手段による非同期モーターの停止方式: a — 非可逆的。 b - リバーシブル
これらのスキームがどのように機能するかを見てみましょう。
SB2 ボタンを押すと、コンタクタ KM のコイルがオンになり (図 2、a を参照)、電力接点が閉じて SB2 ボタンがブロックされます。同時に、ブレーキコンタクタKM1のコイルと速度制御リレーSRの回路内の開放ブロックKMの接点がネットワークから切り離されます。モーターローターが一定の速度に達すると SR 接点が閉じますが、これにより KM1 コンタクターは動作しなくなります。エンジンは正常に動作し続けます。
カウンタスイッチングブレーキによるモーターの停止は、SB ボタンを押すことによって行われます。同時に、コンタクタKMのコイルが中性化され、その主接点が消えてモータがネットワークから切断されます。 KM1 のブレーキ接触器回路の KM 開放接点が閉じます。この瞬間、速度制御リレー SR の接点が閉じ、ブレーキ接触器の主接点が直ちにオンになり、固定子巻線が逆方向に切り替わるため、磁界は逆方向、つまり回転方向に回転し始めます。カウンタ切り替えによりローターとモーターの回転が停止します。ローターの速度が低下し、ある小さな値になると、RKS 速度制御リレーの接点が開き、モーターが主電源から切断されます。
逆ブレーキによるリバース制御 (図 2、b) の場合、ボタン SB1 を押すとモーターが順方向に始動し、コンタクター KM1 のコイルの回路が閉じることで、モーターが確実にモーターに接続されます。通信網。モーターローターが回転を開始し、一定の速度に達すると速度制御リレーの閉接点 SR1 が閉じ、開接点 SR2 が開きます。
コンタクタ KM1 の開放接点が回路を遮断しているため、コンタクタ KM2 のコイルはオンになりません。この位置では、SB ボタンが押されるまでモーターは動作し続けます。 SBボタンを押すとコイルKM1の回路がオフになります。これにより、ブレーク接点 KM1 が閉じ、コンタクタ KM2 のコイル回路に電力が供給されます。
モーターの固定子巻線が逆転します。ローターが慣性によって同じ方向に回転し続けると、逆ブレーキが発生します。速度が特定の小さな値まで低下すると、速度制御リレーが接点 SR1 を開き、コンタクタ KM2 がオフになり、モータがネットワークから切断されます。
エンジンをリバースで始動するには、SB2 ボタンを押します。プロセス全体は、説明したプロセスと同様になります。現在、ブレーキ コンタクタの役割は KM1 コンタクタによって行われ、速度制御リレーの SR2 接点がブレーキ プロセスを制御します。
同期モーターの自動始動にはよく知られた問題が伴います。この場合、始動電流を制限するだけでなく、機械をネットワークと同期させる必要があるからです。
低電力同期モータの制御回路を図に示します。 3. 突入電流の制限は、固定子巻線に含まれるアクティブ抵抗によって提供されます。エンジンを始動する前に、AC および DC 主電源の自動入力スイッチ QF および QF1 をオンにして、最大限の熱保護を提供します。スタートボタン SB2 を押すと、コンタクタ KM のコイルがオンになり、KM の主接点を介して同期モータの固定子巻線が起動抵抗 Rn を介してネットワークに接続されます。コイルはセルフロック式で、DC 回路内のその接点にはロッキング リレー KV が含まれており、その閉接点が閉じると、コンタクタ K1 および K2 のコイルがオンになる準備が整います。
LM ロータの励磁回路内の周波数リレー KF1、KF2 はエンジン回転数に応じて動作し、始動時、ロータ滑りが最も大きくなるときにリレー KF1、KF2 の遮断接点が開きます。コイルの開放は、KV ブロッキング リレーがオンになる前に発生し、K1 コイルは電力を受け取りません。リレー接点 KF1 と KF2 は、エンジン RPM がリレーの規定に従って同期して約 60 ~ 95% に達すると再び閉じます。
リレー KF1 の接点を閉じた後、コンタクタ K1 のコイルがオンになり、主回路の接点が始動抵抗 Rp を短絡し、ステータがフルライン電圧までオンになります。リレー KF2 の開いた接点が閉じると、コンタクタ K1 とは独立してコンタクタ K2 のコイルに電力を供給する回路が作成され、その接点は同期速度の約 60% の速度で開きます。
コンタクタ K2 には 2 つの巻線があります。1 つは KM1 を引っ張る主巻線、もう 1 つはコンタクタに付属のロックを解除するように設計された 2 番目の巻線 KM2 です。巻取りコイル KM1 のスイッチを入れた後、励磁回路内の閉接点 K2 が閉じ、開接点 K2 が開き、ロータ巻線が放電抵抗器 R1 および R2 から切り離され、ロータが DC ネットワークに接続されます。
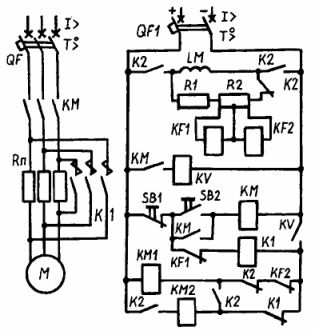
米。 3. 同期モータ制御方式
コンタクタ K2 の接点は次の順序で動作します。 N / O 接点 K2 はピックアップ コイルの供給回路で開きますが、遮断動作によりコンタクタは通電状態に保たれます。閉接点 K2 は 2 つのコイルの供給回路とコイル KM2 の回路で閉じ、その後のスイッチオンに備えて回路を準備します。ロック機構がコイル KM2 から解放されるとすぐに、コイル K2 は非通電になります。 SB1 ボタンを押すと、モーターが主電源から切断されます。コイル K1 はコイル KM2 の回路内の開放接点を解放します。これによりラッチが解放され、コイル KM1 がオフになります。その後、回路は元の位置に戻ります。