時間の関数としての自動制御回路のノード
 電磁、電子、モーター、電空はオートメーション回路で広く使用されています。 タイムリレー... 最も一般的な信号持続時間の変換スキームを図に示します。 1. ダイアグラム図1、押し続けている時間に関係なく、一定時間のパルスを提供します。 ボタン SB。ボタン SB を押すと、リレー K が作動し、機構をオンにする衝動が与えられます。パルスの持続時間は、KT リレーの時間遅延によって決まります。 SBボタンをKQコマンドリレーに置き換えることも可能です。
電磁、電子、モーター、電空はオートメーション回路で広く使用されています。 タイムリレー... 最も一般的な信号持続時間の変換スキームを図に示します。 1. ダイアグラム図1、押し続けている時間に関係なく、一定時間のパルスを提供します。 ボタン SB。ボタン SB を押すと、リレー K が作動し、機構をオンにする衝動が与えられます。パルスの持続時間は、KT リレーの時間遅延によって決まります。 SBボタンをKQコマンドリレーに置き換えることも可能です。
図8、b(電磁式タイムリレー付き)および図。 1、c(電空式または電動タイムリレー付き)は、トラベルスイッチSQの動作開始後に短時間パルスを供給するために使用されます。これらおよびその後のスキームでは、連絡先の代わりに モーションスイッチ KQリレー接点が使用可能です。
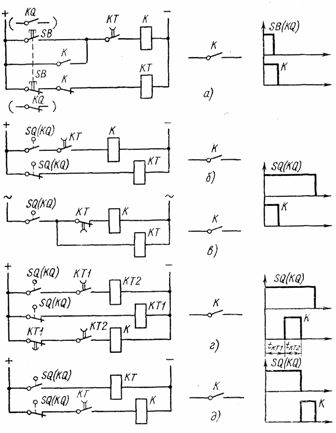
米。 1. 信号の長さを変換する回路
スキーム図。図1dは、スイッチSQの動作の開始後に時間遅延tKT1を伴う持続時間tKT2のパルスを提供する。
回路ノード図1、e. このパルスが印加される前に時間遅延 tKT1 が必要な場合、図の回路は次のようになります。 1、e. パルス幅は tKT2 です。
位置制御回路では図の回路が使われます。 1gは、トリップスイッチSQへの衝撃の終了後にロングコマンドを発行する機能を実行する。コマンドは、SQ スイッチで新しいアクションが開始されるとキャンセルされます。
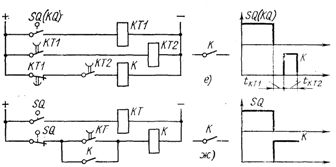
従来の方法でオン/オフを切り替えることにより、短い時間遅延 (最大 1.5 秒) が得られます。 中間リレー コンデンサまたはダイオードによるコイルの分流によるものです。
図の図では、接点 KQ が閉じると、コンデンサ C の充電時間によって決まる時間遅延をもってリレー K が作動します。KQ が閉じると、コンデンサの放電によりリレー K も遅延して戻ります。

米。 2. 中間リレーのコイルをコンデンサやダイオードで短絡して遅れを得る
リレーがオンのときのみ遅延時間を得るには、図の回路を使用します。 2、b.コンデンサはすぐに抵抗器 R に放電するため、リレーがオフになったときの遅延はほとんどありません (抵抗器 R の抵抗はリレー コイル K の抵抗よりも大幅に小さいため)。同様の問題は図の回路によって解決されます。 2c、KQ リレーの 1 つの開放接点を使用します。この回路の欠点は、信号が存在しない場合に抵抗を介してエネルギーが大幅に損失することです。
図のスキーム。 2dでは、接点KQが開くと、抵抗Rによって制御される時間遅延とともにリレーKがオフになります。
図の図によると。 2、eコマンドリレーKQの接点が閉じた後、Kがオフになると時間遅れが生じます。
コマンドリレー KQ の作動時にリレー K の戻りにわずかな遅れが必要な場合は、図の図のようになります。図2のeでは、リレーKのコイルがダイオードによって分流されている。
与えられた持続時間とデューティサイクルのパルスを生成するスキームを図に示します。 3、a.パルスの持続時間は KT2 リレーの遅延時間によって決まり、一時停止は KT1 リレーの遅延時間によって決まります。
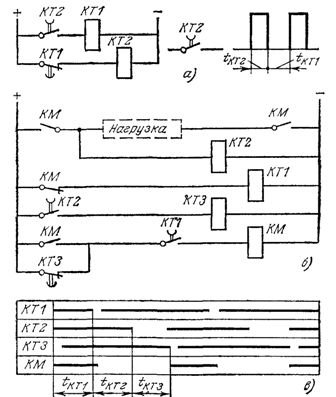
米。 3. パルス発生用リレー回路
図では。図3のbは、延長された休止時間を伴う機構の定期的なスイッチオンの図を示しています. コンタクタKMのスイッチオン時間はリレーKT1の時間遅延に等しく、休止時間の合計はリレー KT2 と KTZ の遅延。タイミング図を図に示します。 3、c。
タイムリレーのパルス発生器の回路図または 論理要素 (下記を参照) は、リニア機構の動作速度を調整するためにも使用されます。温度コントローラーも普及し、KEP-12U コマンド デバイスが組み込まれ、多くの点でエンジン タイミング リレーと同様になりました。このユニットには、エグゼクティブモーター、可変ギア、カムドラム、スイッチ、12 個の接点が備わっています。
速度調整器は通常、KEP-12Uデバイスの周期的動作のスキームを使用します(図4、a)。この回路は、リレーK1とK2、およびコマンドデバイスKT.1とKT.2の接点を使用して作成されます。その回路図は図に示されています。 4、b.
作業を始める前にSスイッチをONにしてください。KQ リレー接点が短時間閉じられて、デューティ サイクルを開始するコマンドが与えられると、K1 リレーが通電されて自己ラッチします。リレー K2 は、コマンド デバイス KT のスイッチをオンにすることによってアクティブになります。モーター巻線 LM1 と LM2 が通電され、カムドラムが回転を開始します。設定された時間(図4のbを参照)に、デバイスKT.3、KT.4などの出力接点が順次閉じて、リニア機構をオンにするコマンドを与えます。サイクルの途中で、接点 KT.1 が開き、リレー K1 がオフになります。
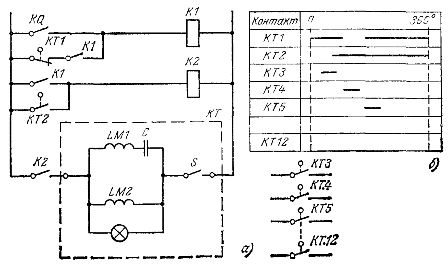
図 4. KEP-12U デバイスを備えたライン速度コントローラ
リレー コイル K2 は、デバイス KT.2 の接点を介して電力供給をサポートします。ドラムを 360 °回転させた後、接点 KT.2 が開き、KEP-12U デバイスのモーターが停止します。チェーンは次のサイクルの準備が整いました。
結論として、電磁時間リレーの遅延を遠隔制御するための 2 つの方式を検討します。
コントロールパネルから遅延を変更するには、トリガーコイルKT.1とリターンコイルKTを備えた2コイルリレー回路を使用できます。 2 (消磁)、MDS は反対方向を向いています (図 5、a)。レリーズコイルのMDSはRPポテンショメータを使用して調整します。磁化反転が戻ってトリップした後にCTが繰り返し動作するのを避けるには、トリップコイルのMDSがアーマチュアを引っ張るのに十分なMDSよりも小さくなければならないか、回路コイルに独自のリレー閉接点を導入する必要があります(図2)。 5、a)。
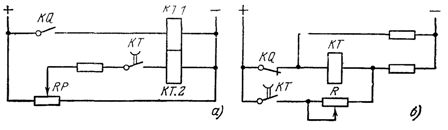
図 5. タイムリレー遅延の遠隔調整の回路図
図の図によると。5、b シングルコイルリレーの時間遅延を遠隔から変更します。接点 KQ が開くと、リレー コイル KT には抵抗器 R によって調整された消磁電流が流れます。消磁電流が増加するとリレーの遅延は減少し、その逆も同様です。電源電圧 220 V では、公称電圧 110 V 用のコイル付きリレーが使用されます。