遠心式・往復式機構の電気駆動方式例
 図では。図1aは、坑道および埋設切羽の底部から地下水を汲み上げるように設計された鉱山排水設備のポンプの技術図を示す。この設備には、充填タンク 1B および 2B を備えた 2 台のポンプ 1H および 2H が含まれており、ポンプの継続的な充填を保証します。
図では。図1aは、坑道および埋設切羽の底部から地下水を汲み上げるように設計された鉱山排水設備のポンプの技術図を示す。この設備には、充填タンク 1B および 2B を備えた 2 台のポンプ 1H および 2H が含まれており、ポンプの継続的な充填を保証します。
ポンプは、リス 1D および 2D を備えた非同期モーターによって回転駆動されます。これらのモーターは、信頼性を高めるために、降下変電所の異なる母線セクションに接続されています (図 1、b)。ピット内の水位が作業レベルを下回っている場合、ポンプは水を汲み上げません。水が作業レベルを超えると、ポンプの 1 つが作動します。水位が緊急レベルを超えると、2 番目のバックアップ ポンプが作動するように接続されます。
図式 電気で動く動き ポンプ モーターのさまざまな制御が可能になります。
• ピットの水位に応じて自動的に、
• リモート(制御室から)、
• 地元の村 コントロールボタンポンプのすぐ近くにあります。
自動 AU およびリモート コントロールの選択は、1UP および 2UP ユニバーサル スイッチを介して行われます。スイッチ 1PP および 2PP を使用すると、各モーターの制御方法 (ボタン 1KU および 2KU を使用したリモート制御とローカル) を選択できます。ソフトウェアスイッチにより、機器の摩耗を均一にし、1D モーターと 2D モーターを走行モーターとして交互に使用できます。
自動エンジン始動 作動ポンプはフロートスイッチ 1PR を使用して実装され、作動水位を制御します。バックアップ ポンプ モーターはフロート リレー 2PR によってオンになり、緊急レベルを制御します。
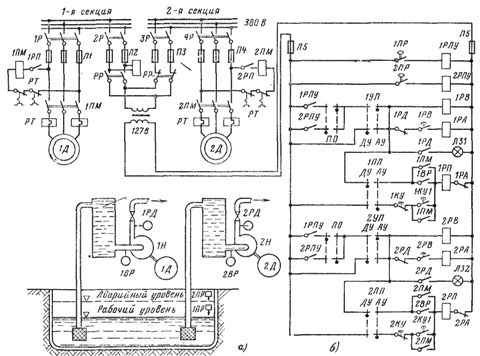
米。 1. 脱水設備 (a) および電気回路 (b)。
リレー 1PB または 2PB の遅延時間の経過後にポンプが必要な圧力を生成しない場合、モーターはネットワークから切断されます。ポンプに水が完全に充填されていない(充填タンクの水位が不足しており、充填制御リレー1BPまたは2BPの接点が開いている)場合でもエンジンは始動しません。
図では。図2は、往復圧縮機の自動電気駆動装置の図を示す。非同期コンプレッサーモーターは、2KP ボタンを使用してコンプレッサー設置場所から、また 1KP ボタンを使用して制御室から始動できます。エアレシーバー(レシーバー)内の圧力が正常より低い場合、2RPリレーを介して始動許可が与えられます。この場合、リレー2RPの回路内の圧力スイッチ1RPの投入接点が閉じ、リレー2RPのコイルに電流が流れ、KL線のコンタクタの回路内の投入接点2RPが閉じる。
コンタクタ KL のスイッチを入れた後、電気油圧バルブ 1KEG のコイルが通電され、圧縮機に冷却水が供給されます。しばらくすると、RV リレーが 4RP リレーに電力を受け取り、2KEG バルブがオンになります。このバルブはコンプレッサーから大気への空気の出口を遮断します。 PBリレーの遅れはエンジン始動時間より若干長いため、2KEGバルブが開き、エンジン始動が容易になります。
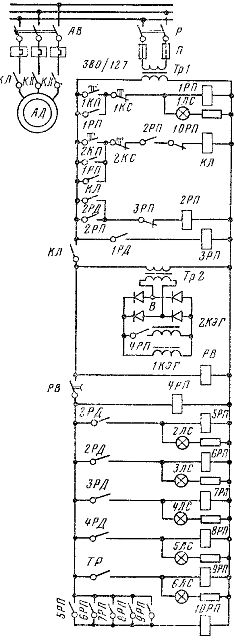
米。 2. 往復コンプレッサーの電気駆動の図。
空気流量が低く、レシーバー内の圧力が標準を超えると、3RP リレー回路の 1RD 接点が閉じます。後者は、開接点によりリレー 2RP をオフにします。接点回路 KL は電力を失い、エンジンはネットワークから切断されます。空気流量が増加し、レシーバー内の圧力が通常に比べて低下すると、圧力スイッチが作動します。は上部接点 1RD を閉じ、リレー 2RP をオンにします。 KL コンタクタのコイルが再び通電され、上記と同じ方法でコンプレッサーが起動します。
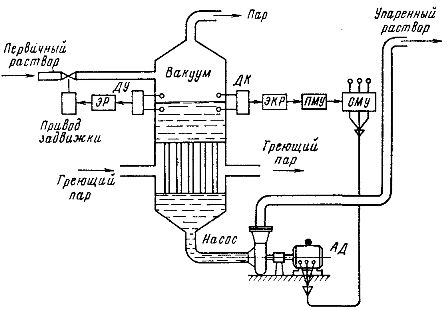
米。 3. 液体蒸発プラントのスキーム
この回路は、冷凍機の空気圧、主軸受に供給される冷却水とオイルの圧力、油温が範囲外になった場合に、エンジンを自動的に停止します。圧力スイッチ 2RD、3RD、4RD と温度リレー TP を使用して、指定されたパラメータを制御します。モーターのシャットダウン信号はリレー 5RP ~ 9RP を介してリレー 10RP に供給され、コンタクタ KL が緊急シャットダウンされます。
図では。図3は、自動液体蒸発プラントの図を示す。この場合、ポンプは液体を製造するための主要な技術プロセスに含まれています。アルカリ溶液は熱交換器で蒸発し、液体濃度が必要なレベルまで増加します。この装置は真空下で動作して溶液の沸点を下げ、蒸気加熱によって装置に供給される熱を減らします。装置からの液体の選択と次の蒸発段階または収集タンクへの液体の供給は、ポンプの助けを借りて連続的に実行されます。液体濃度の必要なレベルは、永続的な制御システムによって維持されます。
このシステムには、装置内の DC 液体のレベルと濃度を制御するためのセンサー、電子レギュレーター ER および EK R、装置の入口の駆動バルブ、および出口の電動ポンプ ドライブが含まれます。液体上の飽和蒸気の温度はその密度に依存するため、液体の濃度はブリッジ温度センサーで測定されます。
必要な濃度レベルは、EKR 電子レギュレータのポテンショメータで設定されます。濃度が所定のレベルに比べて増加すると、EKR の出力電圧と中間磁気増幅器 PMU の制御電流が増加します。ポンプモーターの速度が増加し、ポンプの流量が増加します。これは、装置を通過する液体の蒸発時間の短縮につながります。したがって、集中力は低下し始めます。
ポンプ流量の増加により装置内の液面が低下すると、ERレギュレーターを介してリモコンの液面センサーが入口バルブをさらに開く信号を出します。追加の溶液の流入により装置内のレベルが回復し、設定濃度レベルの最速の回復に貢献します。
図では。図4は、最大7〜10kWの電力を備えたポンプの自動電気駆動の図を示しています。ポンプはかご型誘導電動機によって駆動されます。モーターの速度は、ステーター回路に含まれる三相磁気アンプ SMU を使用して制御されます。装置の静水頭が大きいため、モーターの速度を少し変えるだけでポンプの流れを調整するのに必要な範囲を提供できます。
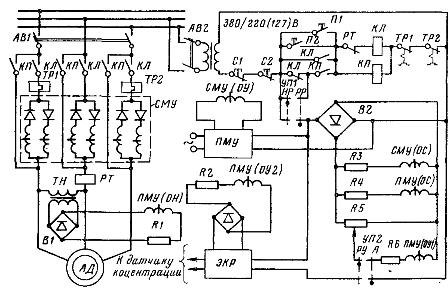
米。 4. 蒸発器ポンプの電気駆動の図。
電気ドライブの十分な剛性の機械的特性を得るために、SMU の動作巻線によって生成される内部の正の電流結合に加えて、負の電圧結合が適用されます。 PMUを使用することにより、SMUの制御に必要な程度にEKRの出力を高めることができるとともに、変圧器VTの小型化や機械的特性の剛性の向上が可能となります。始動時のエンジントルクを増加させるために、磁気パワーアンプはギアボックスコンタクターによって動かされます。
エンジン制御回路により、メイン コントロール パネルおよび設置場所 (ボタン P1、P2、C1、C2) からポンプを起動および停止することができます。スイッチ UP1 を使用すると、HP ポンプの無調整動作モードを設定できます。 SMU はコンタクタ KP に囲まれたままとなり、始動終了時の KP が電流リレー RT によってオフになり、SMU の動作巻線がコンタクタ KP に導入されると、ポンプは調整可能なモード PP と同様に最大の性能を発揮します。ステータ回路。 UP2 スイッチを使用すると、ポンプの調整可能な動作モードの 1 つ (RU の自動制御または手動制御) を選択できます。