ロボットとロボット装置 — 用語と定義
ロボット: 2 つ以上のプログラム可能な可動性を備え、一定レベルの自律性を持ち、割り当てられたタスクを実行するために外部環境内を移動できる実行デバイス。
ロボット装置: 産業用ロボットまたはサービス ロボットの特性を備えていますが、必要な数のプログラム可能な動作角度や一定レベルの自律性を備えていない実行デバイス。
GOST R 60.0.3.1-2016 ロボットおよびロボット装置。検査の種類
ロボット: 2 つ以上の軸でプログラム可能で、ある程度の自律性を備え、作業環境内で移動し、意図したとおりにタスクを実行する駆動機構。
注 1 ロボットには、制御システムと制御システム インターフェイスが含まれています。
注2 ロボットは、その目的に応じて産業用ロボットとサービスロボットに分類されます。
ロボット装置: 産業用ロボットやサービスロボットの特性を備えたアクチュエータ。プログラムできない軸や自律性が不十分な場合があります。
アンプの例;遠隔制御装置;産業用二軸マニピュレーター。
産業用ロボット: 3 軸以上でプログラム可能な、自動制御、再プログラム可能な多機能マニピュレーター。所定の場所に固定することも、産業オートメーションタスクを実行するために移動式にすることもできます。
注 1 — 産業用ロボットには以下が含まれます。 — アクチュエーターを含むマニピュレーター。 — ペンダント用ペンダントおよび通信インターフェース(電子機器およびソフトウェア)を含むコントローラー。
注 2: このオブジェクトには追加の統合軸がある場合があります。
ロボットシステム: ロボット、ロボットの動作部品、ロボットの動作をサポートする機械、設備、装置、センサーなどを含むシステム。
産業用ロボットシステム: 産業用ロボット、作業体、機械、設備、装置、ロボットの動作をサポートする外部補助軸、センサーなどを含むシステム。
GOST R ISO 8373-2014 ロボットおよびロボット装置。用語と定義
産業用ロボット
固定式または可動式の自動機械で、数度の可動性を備えたマニピュレーターの形をした実行装置と、生産プロセスでモーターおよび制御機能を実行するための再プログラム可能なプログラム制御装置で構成されます。
注: 再プログラミングは、自動的に、または人間のオペレーターの助けを借りて、制御プログラムを置き換える産業用ロボットの特性です。再プログラミングには、制御装置のリモコンの制御を使用して、移動度および制御機能の程度に応じて変位の順序および(または)値を変更することが含まれます。
GOST 25686-85。マニピュレーター、自動車運転手、産業用ロボット。用語と定義 (修正第 1 号)
ロボット工学は、自動および自動化された技術システム (ロボット) の設計、製造、応用を扱う基礎科学および応用科学の一分野です。ロボットとは、人間の支援なしで動作できる、特別に設計された再プログラム可能な機械装置です。
ジャスティン J. BASIC 対決を超えて // PC Tech Journal。 — 1987年9月。 — P. 136. — (B.H. ロプホフ訳)。
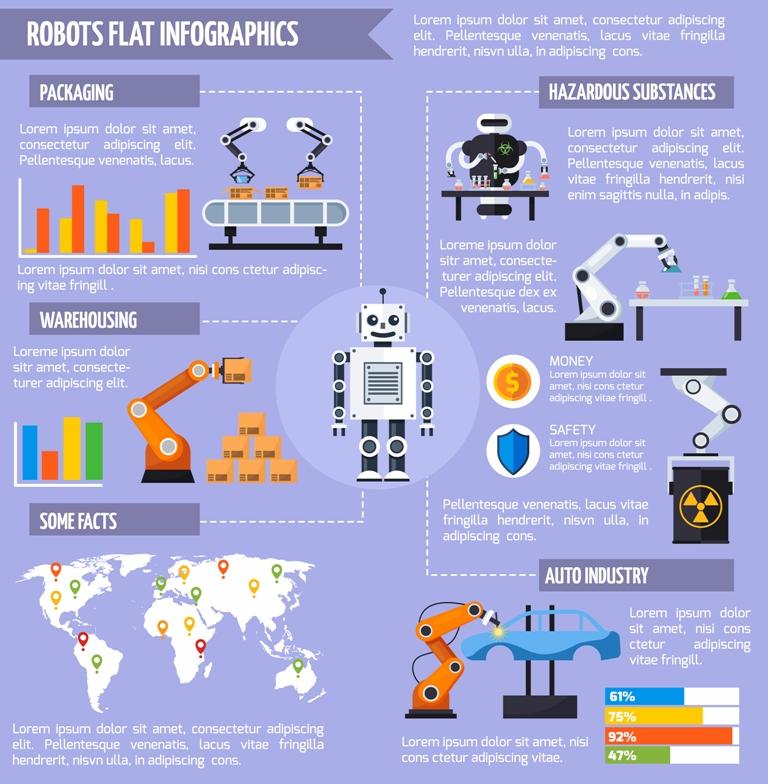
インフォグラフィックロボット:
現代のロボット工学に登場したとき、ロボットは人間が物理的な作業を行うのと同様の機械的動作を実行する自動機械として定義されていました。ロボットのアイデアを生み出したのは、何よりも困難で危険な仕事を人間に置き換えたいという願望でした。しかし、現代のロボット工学では、ロボットが人間の一般的な寸法を超えているため、ロボットの定義を大幅に拡張する必要があります。現代のロボット工学の主題は、人間を含む生物世界全体の物体の技術的類似物です。
Yurevich E. I. ロボット工学の基礎: 調査。手当。 — 第 4 版、改訂。そして追加します— SPb.: BHV-サンクトペテルブルク、2018 年。
「ロボット」という用語はスラブ語に由来します。有名な作家カレル・チャペックによって劇「R.U.R.」で紹介されました。 (ロッサムユニバーサルロボット)。この言葉は、人間に代わって過酷な肉体労働を行うために設計された機械ロボットにちなんで名付けられました。「産業用ロボット」という専門用語は、20 世紀の 70 年代に登場しました。しかし、ロボット工学のルーツは、人型の装置、可動のカルト人物、機械の使用人を作成する最初の試みがなされた古代に遡ると考えることができます。
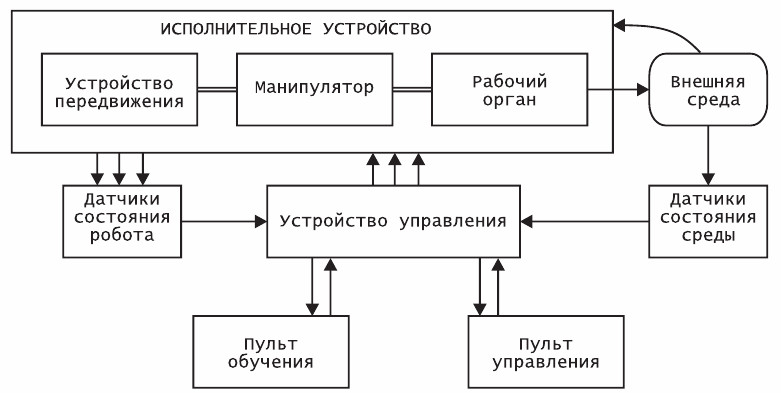
ロボットは、人間に固有のさまざまな動作といくつかの知的機能を実行するように設計された技術複合体です。ロボットには、必要な実行装置、制御システム、情報システムに加え、計算および論理タスクを解決するためのツールが装備されています。ロボットの主な構成要素は、操作機構と、マイクロコンピュータまたはマイクロプロセッサのセットを含む自動制御システムであり、場合によってはセンサーデバイスも含まれます。
産業用ロボットの構造図:
ブルガーコフ A. G.、ヴォロビエフ V. A. 産業用ロボット。運動学、ダイナミクス、制御、管理。エンジニアリングライブラリシリーズ。 — M.: ソロンプレス、2008 年。
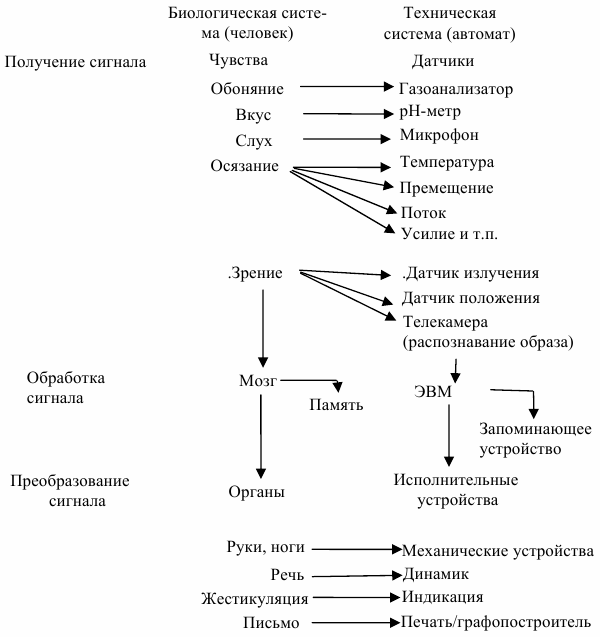 生物学的システムと技術システム (人間とロボット) における信号の受信、処理、変換のプロセス間の類似性
生物学的システムと技術システム (人間とロボット) における信号の受信、処理、変換のプロセス間の類似性
ロボット工学の法則
1. ロボットは人に危害を加えたり、ロボットの不作為によって人に危害を加えたりしてはなりません。
2. ロボットは、その命令が第一法則に抵触する場合を除き、人間から与えられたすべての命令に従わなければなりません。
3. ロボットは第一法則、第二法則に反しない範囲で安全性を確保しなければなりません。
アイザック・アシモフ、1965
このトピックに関する記事: