交流電気機械
電気機械は、機械エネルギーを電気エネルギーに変換する (AC および DC 発電機)、またはその逆 (電気モーター) に使用されます。
これらすべての場合において、基本的に電磁気学の分野における 3 つの主要な発見が使用されています。1 つは 1821 年にアンペールによって発見された電流の機械的相互作用の現象、1831 年にファラデーによって発見された電磁誘導の現象、そして 1831 年にファラデーによって発見されたこれらの現象の理論的要約です。 Lenz (1834) は、誘導電流の方向に関する彼のよく知られた法則で研究しました (実際、レンツの法則は、電磁プロセスのエネルギー保存の法則を予測しました)。

機械エネルギーを電気エネルギーに、またはその逆に変換するには、電流と磁場 (磁石または電流) による導電回路の相対運動を作り出す必要があります。
連続運転用に設計された電気機械では、固定部分 (ステーター) の内側にある機械の可動部分 (交流機械のローター) の回転運動が使用されます。磁界を生成する役割を果たす機械のコイルはインダクタと呼ばれ、動作電流が流れるコイルはアーマチュアと呼ばれます。これら後者の用語はどちらも DC マシンにも使用されます。
磁気誘導を高めるために、機械巻線は強磁性体 (鋼、鋳鉄) 上に配置されます。
すべての電気機械は可逆性の特性を持っています。つまり、電気エネルギーの発電機としても電気モーターとしても使用できます。

非同期モーター
非同期モーターを使用 電磁誘導現象の一つ…物理学の授業では、次のように証明されます。
中心を通る垂直軸の周りを回転できる銅製のディスクの下に、同じ軸の周りを回転するように駆動される垂直馬蹄形磁石が配置されます (ディスクと磁石の間の機械的相互作用は除外されます)。この場合、ディスクは磁石と同じ方向に回転し始めますが、速度は遅くなります。ディスクの機械的負荷を増加させると (たとえば、スラスト ベアリングに対するアクスルの摩擦を増加させることによって)、ディスクの回転速度が低下します。
この現象の物理的意味は、電磁誘導の理論によって簡単に説明されます。磁石が回転すると、回転磁場が生成され、それがディスク内に渦電流を誘導します。後者の大きさは、他の条件が等しい場合、次の条件に依存します。フィールドとディスクの相対速度。
レンツの法則によれば、ディスクは場の方向に回転しなければなりません。摩擦がない場合、ディスクは磁石の速度と等しい角速度を獲得する必要があり、その後、誘導起電力は消失します。現実では、摩擦が必然的に存在し、ディスクの速度が低下します。その大きさは、ディスクが受ける機械的制動モーメントによって異なります。
ディスク(ローター)の回転速度と磁場の回転速度の相違がモーターの名前に反映されています。
非同期モーターの動作原理:
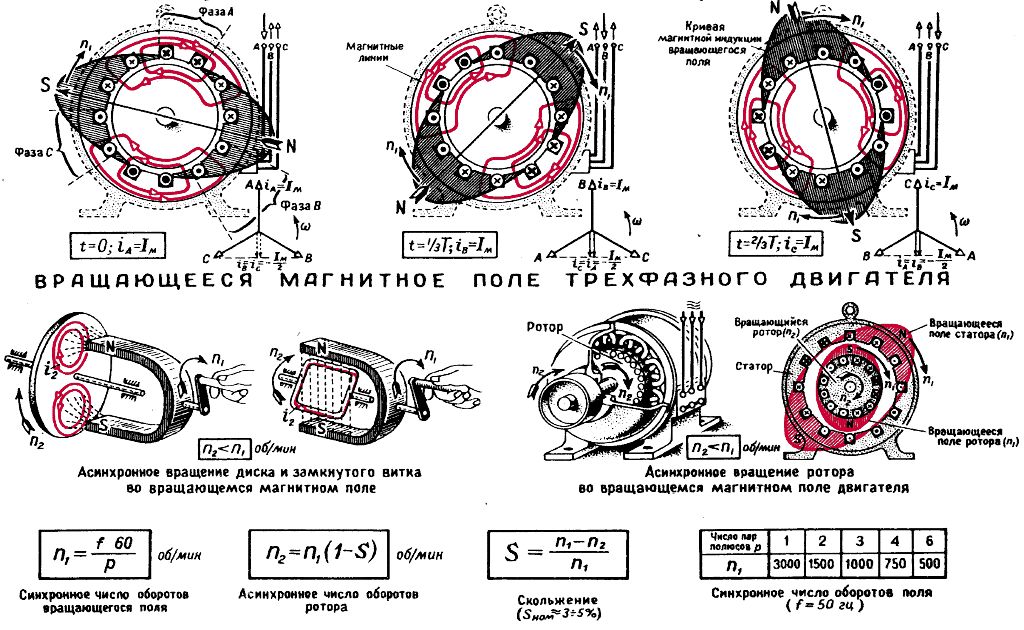
技術的な非同期モーター (ほとんどの場合は三相) では、回転磁界が生成されます。 多相電流固定子巻線の周りを流れます。三相電流の周波数が で、ステータコイルの数が 3p のとき、回転磁界は n = f / p 回転/秒になります。

回転可能なローターがステーターキャビティ内に配置されています。最も単純な「リスセル」モーターでは、ローターは鋼製の円筒体の溝に配置された縦方向の金属ロッドのシステムで構成されています。ワイヤは 2 つのリングによって短絡されます。トルクを高めるために、ローターの半径を十分に大きくします。
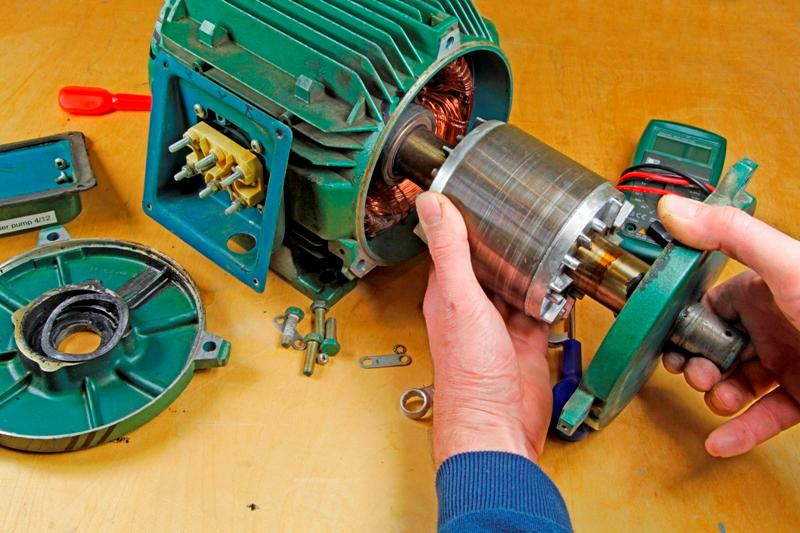
他のモーター設計 (通常は高出力モーター) では、回転子ワイヤは開放三相巻線を形成します。コイルの端はローター自体で短絡され、リードはローターシャフトに取り付けられた3つのスリップリングに引き出され、ローターシャフトから絶縁されています。
三相加減抵抗器は、滑り接点 (ブラシ) を使用してこれらのリングに接続されており、モーターを始動させる役割を果たします。モーターを回転させた後、加減抵抗器は完全に取り外され、ローターはかご型になります (—を参照) 巻線ローターを備えた非同期モーター).

ステータハウジングには端子台があります。固定子巻線がそれらに引き出されます。含めることができます 星か三角、主電源電圧に応じて、最初のケースでは主電源電圧が 2 番目のケースより 1.73 倍高くなる可能性があります。
誘導電動機の固定子磁界と比較した回転子の相対的な減速度を特徴付ける値は、と呼ばれます。 滑る… 100% (モーター始動の瞬間) からゼロ (ローターのロスのない動きの理想的なケース) まで変化します。
誘導モーターの回転方向の反転は、モーターに電力を供給する電気ネットワークの 2 本ごとの直線導体を相互に切り替えることによって実現されます。

かご型モーターは産業界で広く使用されています。非同期モーターの利点は、設計がシンプルであることと、滑り接触がないことです。
最近まで、このようなモーターの主な欠点は、速度調整が難しいことでした。これは、ステーター回路の電圧を変更するとトルクが急激に変化するためですが、供給電流の周波数を変更するのは技術的に困難でした。最新のマイクロプロセッサ デバイスは、供給電流の周波数を制御してモーターの速度を変えるために現在広く使用されています。 周波数変換器.
オルタネータ
オルタネーターは、大きな電力と高電圧に耐えられるように設計されています。非同期マシンと同様に、2 つの巻線があります。通常、電機子巻線はステータハウジング内にあります。一次磁束を生成するインダクタはロータに取り付けられており、ロータ シャフトに取り付けられた小型の DC 発電機である励磁器によって電力が供給されます。高出力の機械では、整流された交流電圧によって励起が行われることがあります。
電機子巻線が固定されているため、高出力での滑り接点の使用に伴う技術的な問題は解消されます。
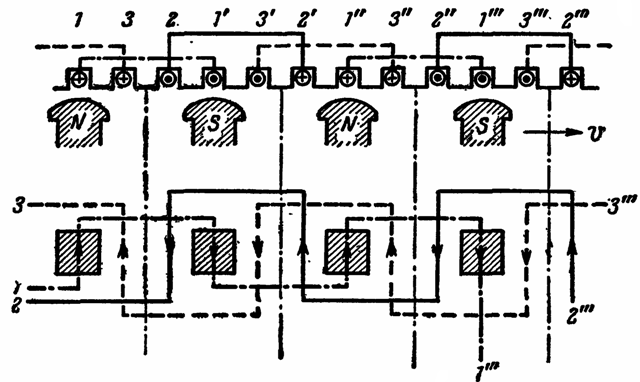
以下の図は、単相発電機の回路図を示しています。ローターには 8 つの極があります。これらには、ロータシャフトに取り付けられたスリップリングに印加される直流電流によって外部電源から電力が供給されるコイル(図示せず)が巻かれている。ポールコイルは、ステータに面する極の符号が交互になるように巻かれます。極の数は偶数である必要があります。
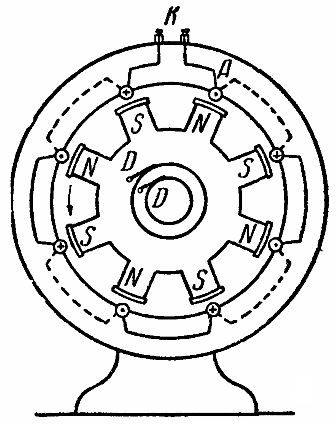
電機子巻線はステーター ハウジング内にあります。図面の平面に垂直な、長く作動する「アクティブ」ワイヤは、図では円で示されており、ローターが回転すると磁気誘導線が交差します。
円は、誘導電場の方向の瞬間的な分布を示しています。ステータの前面に沿って延びる接続ワイヤは実線で示され、背面は破線で示されています。 K クランプは、外部回路を固定子巻線に接続するために使用されます。ローターの回転方向は矢印で示されています。
クランプ K の間を通る半径に沿って機械を頭の中で切断し、平面にすると、固定子巻線と回転子の磁極 (側面と平面) の相対位置が概略図で示されます。
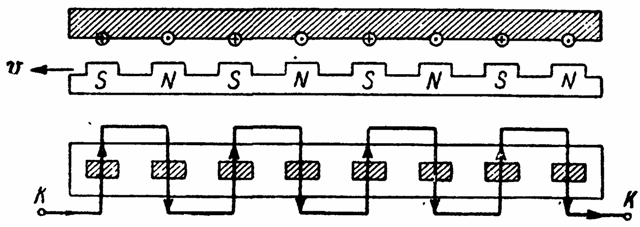
この図を考慮すると、すべてのアクティブなワイヤ (インダクタの極を通過する) が互いに直列に接続されており、それらのワイヤに誘導される EMF が合計されることがわかります。すべての EMF の位相は明らかに同じです。ローターが 1 回転する間に、各ワイヤ (したがって外部回路) で 4 つの完全な周期の電流変化が得られます。
電気機械に p 対の極があり、回転子が 1 秒あたり n 回転する場合、電気機械が受け取る交流の周波数は f = pn Hz となります。
ネットワーク内の EMF の周波数は一定でなければならないため、ローターの回転速度も一定でなければなりません。技術的な周波数 (50 Hz) の EMF を得るには、ローターの極数が十分に大きい場合、比較的ゆっくりとした回転を使用できます。
三相電流を得るために、3 つの別々の巻線がステーター本体に配置されます。それらのそれぞれは、他の 2 つに対して、インダクタの隣接する (反対の) 極間のアーク距離の 3 分の 1 だけオフセットされています。
インダクタが回転すると、位相 (時間) が 120 ° シフトされたコイル内に EMF が誘導されることを確認するのは簡単です。コイルの端は機械から取り外されており、スターまたはデルタで接続できます。
発電機では、磁界と導体の相対速度は、ローターの直径、ローターの 1 秒あたりの回転数、および極対の数によって決まります。

発電機が水流によって駆動される場合(水力発電機)、通常、低速回転で発電されます。所望の電流周波数を得るには、極数を増やす必要があり、そのためにはロータの直径を大きくする必要があります。
多くの技術的な理由から 強力な水素発生装置 通常、垂直シャフトがあり、水力タービンの上に配置されているため、回転します。

蒸気タービン駆動発電機 — タービン発電機は通常高速です。機械的な力を軽減するために、タービン発電機の直径は小さく、それに応じて極数も少なくなり、多くの技術的考慮事項により、水平軸を備えたタービン発電機を製造する必要があります。
発電機が内燃機関によって駆動される場合、それはディーゼル発電機と呼ばれます。これは、一般に、燃料消費量が安価なエンジンとしてディーゼルエンジンが使用されるためです。

発電機可逆性、同期モーター
外部電源から発電機の固定子巻線に交流電圧が印加されると、インダクターの極と固定子で生成される電流の磁界との相互作用が発生し、同じ方向からのトルクが作用します。すべての極に。
回転子が交流の半分の周期の直後に回転する速度で回転すると、インダクタの次の極 (最初の極と符号が反対) が固定子巻線の検討中のワイヤの下に収まり、そのとき、方向を変えた電流との間の相互作用力は同じままです。
このような状況下では、ローターはトルクの継続的な影響下にあり、動き続け、あらゆる機構を駆動することができます。ローターの動きに対する抵抗の克服は、ネットワークによって消費されるエネルギーによって発生します。 発電機は電気モーターになります.

ただし、連続運動は厳密に定義された回転速度でのみ可能であることに注意してください。これは、回転速度から逸脱した場合、加速モーメントがローターの各極に部分的に作用し、ローターの 2 つの導体間を移動するためです。ステーター、時間の一部 - 停止。
したがって、モーターの回転速度は厳密に決定する必要があり、極が次の極に置き換わる時間は電流の半周期と一致する必要があり、そのためこのようなモーターが呼ばれます。 同期的に.
固定ロータのステータ巻線に交流電圧が印加されると、電流の最初の半サイクル中にロータのすべての極が同じ符号のトルクの作用を受けますが、それでも慣性により、ローターを動かす時間がなくなります。次の半サイクルでは、すべてのローター極のトルクの符号が反対に変わります。
その結果、ローターは振動しますが、回転できなくなります。したがって、同期モータは最初に巻き上げられる、つまり通常の回転数になる必要があり、その後でのみ固定子巻線の電流をオンにする必要があります。
同期モーターの開発は、機械的方法(低出力の場合)と特殊な電気デバイス(高出力の場合)によって実行されます。
負荷がわずかに変化した場合、モーター速度は新しい負荷に適応するために自動的に変更されます。したがって、モーターシャフトの負荷が増加すると、ローターはすぐに減速します。したがって、線間電圧と固定子巻線のインダクタによって誘導される逆誘導起電力との間の位相シフトが変化します。
さらに、アーマチュアの反作用によりインダクタの減磁が発生するため、ステータ電流が増加し、インダクタのトルクが増大し、モータが再び同期回転を開始して負荷の増加に打ち勝ちます。負荷の軽減でも同様のプロセスが発生します。
負荷が急激に変動すると、モーターのこの適応性が不十分になる可能性があり、モーターの速度が大幅に変化し、「同期が外れ」、最終的に停止します。その一方で、ステーターに誘導された誘導起電力が消失し、ステーター内の電流が増加します。鋭く。したがって、負荷の急激な変動は避けなければなりません。モーターを停止するには、当然のことながら、まずステーター回路を切断し、次にチョークを切断する必要があります。エンジンを始動するときは、操作の逆の順序に従う必要があります。
同期モーターは、一定速度で動作する機構を駆動するために最もよく使用されます。同期モーターの長所と短所、および同期モーターの起動方法を次に示します。 同期モーターとその応用
教育用フィルム ストリップ - 「同期モーター」、1966 年に教育用視覚教材工場によって作成されました。ここで見ることができます: フィルムストリップ「同期モーター」
