周波数変換器 - 種類、動作原理、接続方式
 電気モーターの回転子は、固定子巻線内の回転電磁場によって引き起こされる力によって駆動されます。その速度は通常、電力網の産業用周波数によって決まります。
電気モーターの回転子は、固定子巻線内の回転電磁場によって引き起こされる力によって駆動されます。その速度は通常、電力網の産業用周波数によって決まります。
標準値の 50 ヘルツは、1 秒間に 50 回の振動周期があることを意味します。 1分間にその数は60倍になり、50×60=3000回転となります。ローターは、印加された電磁場の影響下で同じ回数回転します。
ステーターに適用される主電源周波数の値を変更すると、ローターとローターに接続されたドライブの回転速度を調整できます。この原理は電気モーターの制御の基礎です。
周波数変換器の種類
設計上、周波数コンバータは次のようになります。
1.誘導型;
2.電子。
非同期モーターの製作 フェーズローターを使用したスキームによると およびジェネレーター モードで開始されたものは、最初のタイプの代表です。動作中は効率が低く、効率が低いのが特徴です。したがって、実稼働環境では広範な用途が見出されておらず、使用されることは非常にまれです。
電子周波数変換方式により、非同期機と同期機の両方の速度調整をスムーズに行うことができます。この場合、次の 2 つの制御原則のいずれかを適用できます。
回転速度の周波数(V / f)依存性の所定の特性に従って、 3.
2. ベクトル制御方式。
最初の方法は最も単純で不完全ですが、2 番目の方法は重要な産業機器の回転速度を正確に制御するために使用されます。
周波数変換ベクトル制御の特長
この方法の違いは相互作用、つまりロータ磁界の周波数で回転する磁束の「空間ベクトル」に対するコンバータ制御装置の影響です。
この原則に基づいて動作するコンバーターのアルゴリズムは、次の 2 つの方法で作成されます。
1. センサーレス制御;
2. 流量調整。
最初の方法は、シーケンスの交替に対する特定の依存性を判断することに基づいています。 パルス幅変調 (PWM) プリセットアルゴリズム用のインバーター。この場合、コンバータ出力電圧の振幅と周波数は、ローター速度フィードバックを使用せずに、スリップ電流と負荷によって制御されます。
この方法は、周波数変換器と並列に接続された複数の電気モーターを制御する場合に使用されます。磁束制御には、モーター内部の動作電流を有効成分と無効成分に分解して監視し、コンバータの動作を調整して出力電圧ベクトルの振幅、周波数、角度を設定することが含まれます。
これにより、エンジンの精度が向上し、調整の限界が広がります。フロー制御を使用すると、クレーンホイストや産業用巻線機など、高い動的負荷で低速で動作するドライブの能力が拡張されます。
ベクトル技術の使用により、動的なトルク制御が実現可能 三相非同期モーター.
等価回路
誘導電動機の基本的な単純化された電気回路は次のように表すことができます。
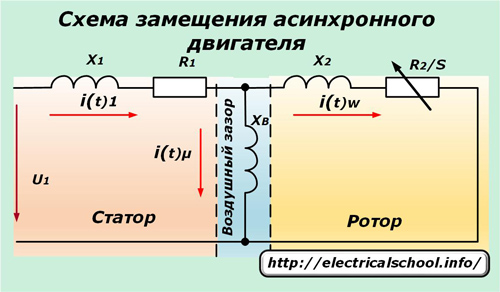
電圧 u1 が固定子巻線に印加され、固定子巻線は能動抵抗 R1 と誘導抵抗 X1 を持ちます。空隙 Xv の抵抗を克服して回転子巻線に変換され、その抵抗を克服する電流が発生します。
ベクトル回路の等価回路
その構造は、誘導モーターで行われるプロセスを理解するのに役立ちます。

固定子電流のエネルギーは 2 つの部分に分割されます。
-
iµ — フロー形成パーティション。
-
iw — モーメント生成コンポーネント。
この場合、ローターは滑りに依存するアクティブ抵抗 R2 / s を持ちます。
センサーレス制御の場合、以下が測定されます。
-
電圧u1;
-
現在のi1。
値に従って、次の計算が行われます。
-
iμ — 流れを形成する流れ成分。
-
iw — 発生トルクの値。
計算アルゴリズムには、電流レギュレーターを備えた誘導モーターの電子等価回路が含まれており、電磁場の飽和条件と鋼の磁気エネルギーの損失が考慮されています。
角度と振幅が異なる電流ベクトルの両方の成分は、ローター座標系とともに回転し、固定ステーター配向システムになります。
この原理に従って、周波数変換器のパラメータは誘導電動機の負荷に応じて調整されます。
周波数変換器の動作原理
インバータとも呼ばれるこのデバイスは、主電源の波形の 2 回の変化に基づいています。
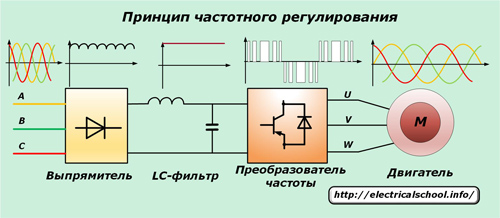
最初に、工業用電圧が強力なダイオードを備えた整流器に供給され、正弦波高調波は除去されますが、信号リップルは残ります。これらを除去するために、インダクタンスを備えたコンデンサ バンク (LC フィルタ) が提供され、整流された電圧に安定した平滑化された形状が提供されます。
信号はその後、6 つの三相ブリッジ回路である周波数コンバーターの入力に送られます。 パワートランジスタ 逆極電圧保護ダイオードを備えた IGBT または MOSFET シリーズ。これらの目的で以前に使用されていたサイリスタは、十分な速度を持たず、大きな外乱で動作します。
モーターの「ブレーキ」モードをオンにするには、エネルギーを散逸させる強力な抵抗器を備えた制御されたトランジスタを回路に取り付けることができます。この技術により、モーターによって生成された電圧を除去してフィルター コンデンサーを過充電や損傷から保護できます。
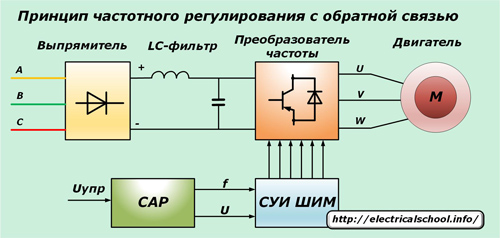
コンバータのベクトル周波数制御方式を使用すると、ACS システムからの信号を自動制御する回路を作成できます。これには管理システムが使用されます。
1. 振幅。
2. PWM (パルス幅シミュレーション)。
振幅制御方法は入力電圧の変更に基づいており、PWM は一定の入力電圧でパワー トランジスタをスイッチングするアルゴリズムに基づいています。
PWM レギュレーションでは、固定子巻線が整流器の正端子と負端子に厳密な順序で接続されると、信号変調期間が作成されます。
発電機のクロック周波数は非常に高いため、電気モーターの巻線には誘導抵抗があり、通常の正弦波に平滑化されます。
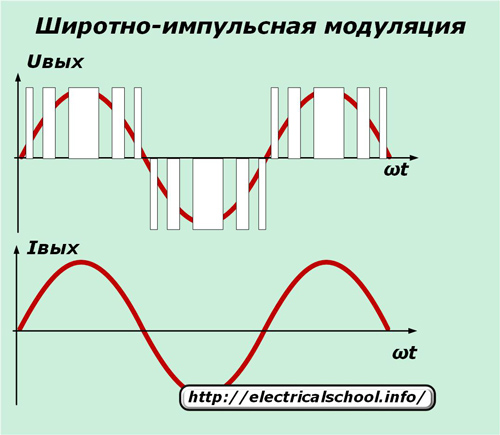
PWM 制御方式は、周波数と振幅の同時制御によりエネルギー損失を最大限に排除し、高い変換効率を実現します。これらは、GTO シリーズ パワーロック サイリスタ制御技術またはバイポーラ ブランドの絶縁ゲート IGBT トランジスタの開発により利用可能になりました。
三相モーターを制御するための組み込みの原理を写真に示します。
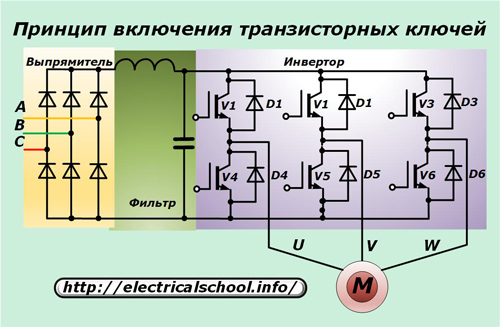
6 つの IGBT はそれぞれ、それ自体の逆電流ダイオードに逆並列回路で接続されています。この場合、誘導電動機の有効電流は各トランジスタの電源回路を通過し、その無効成分はダイオードを介して導かれます。
インバーターとモーターの動作に対する外部電気ノイズの影響を排除するために、周波数変換器の回路には ノイズリダクションフィルター清算:
-
無線干渉。
-
機器の動作によって引き起こされる放電。
これらはコントローラーによって信号が送信され、衝撃を軽減するためにモーターとインバーターの出力端子の間にシールド配線が使用されます。
非同期モーターの動作精度を向上させるために、周波数変換器の制御回路には次のものが含まれます。
-
高度なインターフェース機能を備えた通信入力。
-
内蔵コントローラー;
-
メモリカード;
-
ソフトウェア;
-
主要な出力パラメータを示す情報 LED ディスプレイ。
-
ブレーキチョッパーと内蔵EMCフィルター。
-
増加したリソースのファンによる送風に基づく回路冷却システム。
-
直流電流によるエンジン加熱機能やその他の可能性。
動作配線図
周波数コンバータは、単相または三相ネットワークで動作するように設計されています。ただし、電圧 220 ボルトの工業用直流電源がある場合は、そこからインバータに電力を供給できます。

三相モデルは主電源電圧 380 ボルト用に設計されており、それを電気モーターに供給します。単相インバータは 220 ボルトで駆動され、時間の経過とともに 3 相を出力します。
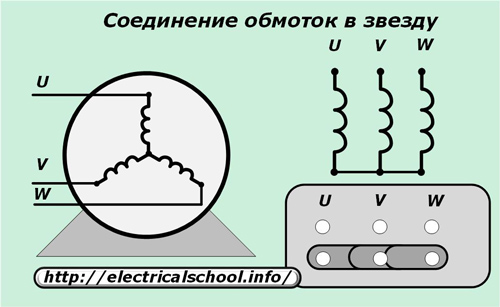
周波数コンバータのモーターへの接続スキームは、次のスキームに従って実行できます。
-
出演者;
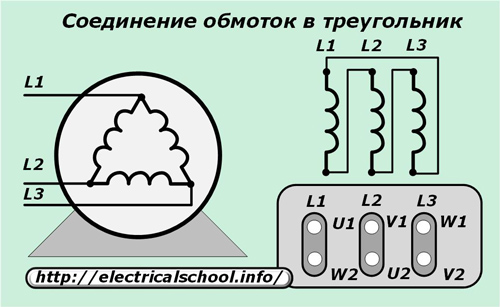
-
三角形。
モーターの巻線はコンバーター用に「スター型」に組み立てられ、380 ボルトの三相ネットワークから電力が供給されます。
「デルタ」方式によれば、電力コンバータが単相 220 ボルトのネットワークに接続されるときに、モーター巻線が組み立てられます。
電気モーターを周波数変換器に接続する方法を選択するときは、インバーターの機能を使用して、低速負荷始動を含むすべてのモードで実行中のモーターが生成できる電力比に注意を払う必要があります。
周波数変換器に常に過負荷をかけることは不可能であり、その出力電力の予備量が少なければ、長期にわたるトラブルのない動作が保証されます。