電気機械におけるエネルギー変換プロセス
 電気機械は目的に応じて、発電機と電気モーターの 2 つの主なタイプに分類されます。発電機は電力を生成するように設計されており、電気モーターは機関車の車輪のペアを駆動したり、ファンやコンプレッサーなどを回転させたりするように設計されています。
電気機械は目的に応じて、発電機と電気モーターの 2 つの主なタイプに分類されます。発電機は電力を生成するように設計されており、電気モーターは機関車の車輪のペアを駆動したり、ファンやコンプレッサーなどを回転させたりするように設計されています。
エネルギー変換プロセスは電気機械で行われます。発電機は機械エネルギーを電気エネルギーに変換します。つまり、発電機が動作するには、何らかのエンジンでシャフトを回転させる必要があります。たとえば、ディーゼル機関車ではディーゼル エンジンによって発電機が回転し、火力発電所では蒸気タービンによって回転します。 水力発電所 - 水車の.
一方、電気モーターは電気エネルギーを機械エネルギーに変換します。したがって、エンジンが動作するには、ワイヤーで電気エネルギー源に接続するか、いわゆる電気ネットワークに接続する必要があります。
あらゆる電気機械の動作原理は、電磁誘導現象と、ワイヤと電流および磁場との相互作用中に発生する電磁力の利用に基づいています。 こういった現象は 発電機と電気モーターの両方の動作中に実行されます。したがって、彼らは電気機械の発電機と電動機の動作モードについてよく話します。
回転電気機械では、2 つの主要な部品がエネルギー変換プロセスに関与します。それは、アーマチュアと、相互に移動する独自の巻線を備えたインダクタです。インダクタは車内に磁場を生成します。電機子巻線では eによって引き起こされる。と…そして電流が発生します。電機子巻線内で電流が磁界と相互作用すると、電磁力が生成され、それによって機械内のエネルギー変換プロセスが実現されます。
電気機械におけるエネルギー変換プロセスの実行用
次の規定は、ポアンカレとバルハウゼンの電気エネルギーの基本定理に由来しています。
1) 機械エネルギーと電気エネルギーの直接相互変換は、電気エネルギーが交流エネルギーである場合にのみ可能です。
2) このようなエネルギー変換プロセスを実行するには、この目的を目的とした電気回路システムが電気インダクタンスまたは電気容量を変化させる必要があります。
3) 交流のエネルギーを直流のエネルギーに変換するには、この目的のために設計された電気回路システムが電気抵抗を変化させる必要があります。
最初の立場から、機械エネルギーは電気機械内で交流エネルギーにのみ変換できるか、またはその逆であることがわかります。
この記述と直流電気機械の存在という事実との明らかな矛盾は、「直流電気機械」ではエネルギーが 2 段階で変換されるという事実によって解決されます。
したがって、直流電気機械発電機の場合、機械エネルギーが交流エネルギーに変換され、後者は「可変電気抵抗」を表す特別な装置の存在によりエネルギーに変換される機械があります。直流から。
電気機械の場合、プロセスは明らかに逆方向に進みます。電気機械に供給される直流エネルギーは、可変抵抗によって交流エネルギーに変換され、交流エネルギーは機械エネルギーに変換されます。
電気抵抗の変化の役割は、従来の「DC コレクタ機」では「電気機械ブラシ」と「電気機械コレクタ」、およびスリップ リングでは「滑り電気接点」によって果たされます。
電気機械でエネルギー変換プロセスを実現するには、電気機械の中に「可変電気インダクタンス」または「可変電気容量」のいずれかが必要であるため、電気機械は電磁誘導の原理または電磁誘導の原理に基づいて作ることができます。電気誘導の原理。最初のケースでは「誘導マシン」が得られ、2番目のケースでは「容量マシン」が得られます。
静電容量マシンは依然として実用上重要ではありません。産業、輸送、日常生活で使用される電気機械は誘導機械であり、実際には「電気機械」という略称が定着していますが、これは本質的により広い概念です。
発電機の動作原理。
最も単純な発電機は、磁場中で回転するループです (図 1、a)。この発電機では、ターン 1 は電機子巻線です。インダクタは永久磁石 2 であり、永久磁石 2 の間で電機子 3 が回転します。
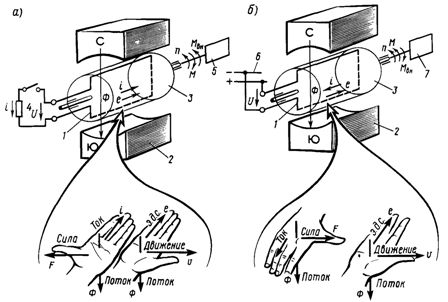
米。 1. 最も単純な発電機 (a) と電気モーター (b) の概略図
コイルが特定の回転周波数 n で回転すると、その側面 (導体) が磁束 Ф の磁力線と交差し、各導体に e が誘導されます。等s.d.図で採用したもの1とアーマチュアの回転方向e.等c. 南極の下にある導体は、右手の法則に従って、私たちから離れる方向に向けられ、e.等v. 北極の下にあるワイヤーの中 - 私たちに向かって。
電気エネルギーの受信器 4 を電機子巻線に接続すると、閉回路に電流 I が流れ、電機子巻線の導線では、電流 I は e と同じ方向に流れます。等SD。
磁界中で電機子を回転させるには、ディーゼルエンジンやタービン(原動機)から得られる機械エネルギーを費やす必要がある理由を理解してみましょう。磁界内の配線に電流 i が流れると、各配線に電磁力 F が作用します。
図に示すように。 1 と左手の法則による電流の方向では、南極の下にある導体には左向きの力 F が作用し、南極の下にある導体には右向きの力 F が作用します。北極。これらの力が合わさって時計回り方向の電磁モーメント M を生成します。
図10の検討から、発電機が電気エネルギーを放出するときに発生する電磁モーメント M は、ワイヤーの回転と逆方向に向いているため、ワイヤーの回転を遅くする傾向のある制動モーメントであることがわかります。発電機のアーマチュア。
アンカーの失速を防ぐには、モーメント M と反対で大きさが等しい外部トルク Mvn をアーマチュア シャフトに加える必要があります。機械の摩擦やその他の内部損失を考慮すると、外部トルクは発電機の負荷電流によって生じる電磁モーメント M より大きくなければなりません。
したがって、発電機の通常の動作を継続するには、外部から機械エネルギーを供給して、各エンジン5でその電機子を回転させる必要があります。
無負荷 (外部発電機回路が開いた状態) では、発電機はアイドル モードになります。この場合、摩擦を克服し、発電機の他の内部エネルギー損失を補償するには、ディーゼルまたはタービンからの機械エネルギー量のみが必要です。
発電機の負荷、つまり発電機によって与えられる電力 REL が増加すると、電機子巻線のワイヤを流れる電流 I とタービンの制動トルク M が増加し、通常の動作が継続されます。
したがって、たとえばディーゼル機関車の電気モーターがディーゼル機関車発電機から消費する電気エネルギーが増えるほど、ディーゼル機関車を回転させるためにより多くの機械エネルギーが必要となり、より多くの燃料をディーゼルエンジンに供給する必要があります。 。
上記で考慮した発電機の動作条件から、その特性は次のとおりです。
1. 電流 i と e の方向を一致させます。等v. 電機子巻線のワイヤ内。これは、マシンが電気エネルギーを放出していることを示します。
2. アーマチュアの回転に抗する電磁制動モーメント M の発生。これは、機械が外部から機械エネルギーを受け取る必要があることを意味します。
電動モーターの原理。
原理的には、電気モーターは発電機と同じように設計されています。最も単純な電気モーターは、電機子 3 上に配置されたターン 1 (図 1、b) で、極 2 の磁界内で回転します。ターンの導体は電機子巻線を形成します。
コイルを電気エネルギー源、たとえば電気ネットワーク 6 に接続すると、電流 I がその各ワイヤを流れ始めます。この電流は、極の磁場と相互作用して、電磁気を生成します。 F を強制します。
図に示すように。図1bに示すように、S極の下にある導体上の電流の方向は、右向きの力Fの影響を受け、左向きの力FがN極の下にある導体に作用する。これらの力の複合作用の結果、反時計回りの電磁トルク M が生成され、ワイヤー付きアーマチュアが特定の周波数 n で回転するように駆動されます...アーマチュア シャフトを何らかの機構または装置に接続する場合 7 (ディーゼル機関車や電気機関車の中心軸、金属切削工具など)、電気モーターがこの装置を回転させ、つまり機械エネルギーを与えます。この場合、このデバイスによって生成される外部モーメント MVN は、電磁モーメント M に向かうことになります。
負荷がかかった状態で動作する電動機の電機子が回転するときに、なぜ電気エネルギーが消費されるのかを理解してみましょう。電機子ワイヤが磁界中で回転すると、各ワイヤ内に e が誘導されることがわかりました。等で、その方向は右手の法則に従って決定されます。したがって、図に示されているようになります。 1、b eの回転方向。等c. S 極の下にある導体に誘導される e は、私たちから遠ざかる方向に向けられます。等北極の下にある導体に誘導された電子は、私たちに向けられます。イチジク。 1、b、eなどであることがわかります。 c. つまり、各導体に誘導された電流は電流 i に逆らう方向に向けられ、電流が導体を通過するのを防ぎます。
電流が同じ方向にアーマチュアワイヤを流れ続けるために、つまり電気モーターが正常に動作し続けて必要なトルクを発生させるために、これらのワイヤに外部電圧 U を印加する必要があります。 e.等c. 一般的な e. よりも大きい。等c. 電機子巻線のすべての直列接続ワイヤに E が誘導されます。したがって、ネットワークから電動モーターに電気エネルギーを供給する必要があります。
負荷 (モーターシャフトに加えられる外部ブレーキトルク) がない場合、電気モーターは外部電源 (主電源) から少量の電気エネルギーを消費し、アイドル状態では少量の電流が流れます。このエネルギーは、マシンの内部電力損失を補うために使用されます。
負荷が増加すると、電気モーターによって消費される電流と電気モーターが発生する電磁トルクも増加します。したがって、負荷が増加するにつれて電気モーターが放出する機械エネルギーが増加すると、電源から引き出される電力も自動的に増加します。
上で説明した電気モーターの動作条件から、その特性は次のとおりです。
1. 電磁モーメント M と速度 n の方向の一致。これは、機械からの機械エネルギーの戻りを特徴づけます。
2. 電機子巻線のワイヤの外観 e.これは、機械が外部から電気エネルギーを受け取る必要があることを意味します。
電気機械の可逆性の原理
発電機と電動機の動作原理を考えると、それらは同じように配置されており、これらの機械の動作の基礎には多くの共通点があることがわかりました。
発電機で機械エネルギーを電気エネルギーに変換し、モーターで電気エネルギーを機械エネルギーに変換するプロセスは、EMF の誘導に関連しています。等pp. 磁界中で回転する電機子巻線のワイヤと、磁界と通電ワイヤの相互作用の結果として生じる電磁力の発生。
発電機と電動機の違いは、e の相互方向のみです。 d. 電流、電磁トルクおよび速度。
考慮された発電機と電動機の動作プロセスを要約すると、電気機械の可逆性の原理を確立することができます。この原理によれば、あらゆる電気機械は発電機および電動機として動作し、発電機モードから電動機モードに切り替えることができます。およびその逆。
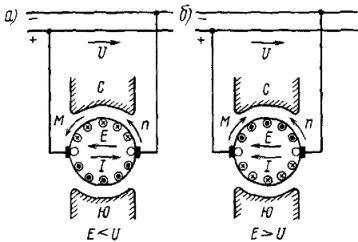
米。 2.eの方向等モーター (a) および発電機 (b) モードでの直流電気機械の動作中の E、電流 I、電機子回転周波数 n、および電磁モーメント M
この状況を明確にするために、仕事について考えてみましょう 直流電気機械 さまざまな条件下で。外部電圧 U が合計 e より大きい場合。等電機子巻線のすべての直列接続ワイヤに v.D. を加えると、図に示す電流 I が流れます。 2 と、方向と機械は電気モーターとして動作し、ネットワークからの電気エネルギーを消費し、機械エネルギーを放出します。
ただし、何らかの理由により e.等c. E が外部電圧 U より大きくなると、電機子巻線の電流 I の方向が変わり (図 2、b)、e と一致します。等v. D. この場合、電磁モーメント M の方向も変わり、回転周波数 n に逆らうようになります...d 方向の一致など。 E と電流 I は、機械がネットワークに電気エネルギーを与え始めたことを意味し、制動電磁モーメント M の出現は、機械が外部から機械エネルギーを消費する必要があることを示します。
したがって、e などの場合、と電機子巻線のワイヤに誘導される E が主電源電圧 U より大きくなると、機械はモーター動作モードから発電機モードに切り替わります。つまり、E < U の場合、機械はモーターとして動作し、E> U となります。発電機。
電気機械のモーターモードから発電機モードへの移行は、さまざまな方法で行うことができます。つまり、電機子巻線が接続されている電源の電圧 U を下げるか、e を増やすことです。等電機子巻線に E が付いています。