機構の位置を検出する非接触センサー
 この記事では、機構の位置センサーについて説明します。基本的に、センサーの主な機能は、特定のイベントが発生したときに信号を発することです。つまり、トリガー イベントが発生すると、センサーがアクティブになり、アナログまたは離散デジタルの信号を生成します。
この記事では、機構の位置センサーについて説明します。基本的に、センサーの主な機能は、特定のイベントが発生したときに信号を発することです。つまり、トリガー イベントが発生すると、センサーがアクティブになり、アナログまたは離散デジタルの信号を生成します。
リミットセンサーは、何十年にもわたって位置センサーとして使用されてきました。スイッチ。これらは、何らかの変数 (位置) が特定の値に達すると機械的に開閉する電気接点で構成されます。さまざまなタイプのリミット スイッチは、多くの制御システムの重要な部分であり、その信頼性はそれらに依存します。このようなセンサーには、リソースが限られている可動機械要素が含まれています。
現在、リミット スイッチはさまざまな近接センサーに置き換えられつつあります。ほとんどの場合、次のタイプの近接センサーが使用されます: 誘導式、発電機、 マグネトヘルコン そして光電子。これらのセンサーは、位置が監視されている移動物体と機械的に接触しません。
非接触位置センサーにより、機構の高速かつ高頻度のスイッチングが保証されます。これらのセンサーの欠点は、その精度が電源電圧と温度の変化に依存することです。要件に応じて、これらのデバイスの出力デバイスは次のようになります。 非接触ロジックエレメントと 電気リレー.
電気駆動装置の精密ブレーキ方式では、近接センサーをシフトダウンと最終停止の両方に指令するために使用できます。
現在市場には多くの種類のセンサーがありますが、この記事の枠組みの中で、直接誘導型位置センサーのトピックに焦点を当てます。80% 以上の場合、機構の位置のセンサーとして機能するのは誘導型センサーであるためです。
誘導センサーは、金属がトリガーゾーンに近づくとトリガーされます。このため、誘導型位置センサーは存在センサー、近接センサー、または単に誘導型スイッチとも呼ばれます。
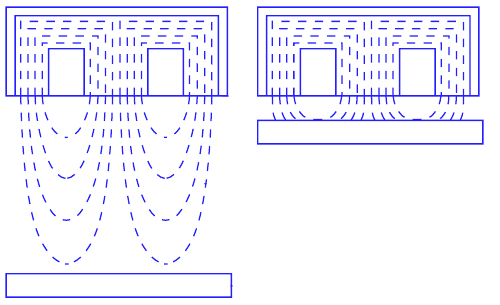
ここで、誘導センサーの動作原理を考えてみましょう。上で述べたように、金属がトリガー ゾーンに十分に近づくと、センサーが作動します。この現象は、関係するものの相互作用で構成されます。 インダクタ 金属が近づくとコイルの磁場の大きさが急激に変化し、センサーが作動し、対応する信号が出力に現れます。
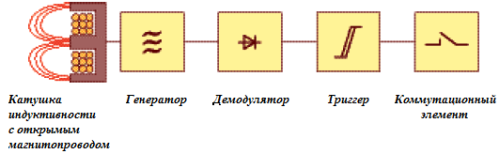
デバイスの電子部分には制御回路が含まれており、リレーやトランジスタ スイッチを制御します。これは次の部分で構成されます。
-
物体との相互作用に必要な電磁場を生成する発生器。
-
スイッチングヒステリシスを提供するシュミットトリガー。
-
必要な作動値に達するように信号の振幅を増加させるアンプ。
-
スイッチのステータスを知らせる LED インジケーター。また、パフォーマンスの監視と構成も提供します。
-
固体粒子や水の浸透を防ぐコンパウンド。
-
センサーを取り付け、さまざまな機械的影響から保護するためのハウジングで、真鍮またはポリアミド製で、ファスナーで仕上げられています。
誘導位置センサーは、機構の任意の部分の位置を定期的または継続的に決定する必要がある産業オートメーション システムで広く使用されています。センサーはドライブに送信される信号を生成します。スターター、コントローラー、リレー、周波数変換器などが実行機構として機能します。重要なことは、センサーのパラメーターが電圧と電流の点でドライブのパラメーターに対応していることです。
ほとんどのセンサーはパワーデバイスではなく、主に信号デバイスであるため、センサー自体は原則として強力なものを切り替えることはなく、制御のみを行い、制御信号を与え、すでに接続されているアクション開始デバイスとして機能します電源切り替えに。
最新の誘導位置センサーは、ほとんどの場合、長方形または円筒形の 2 つのバージョンのプラスチックまたは金属ハウジングで見られます。円形断面のセンサーの直径は 4 ~ 30 mm ですが、最も一般的に使用される直径は 18 mm と 12 mm です。
センサーが機器に取り付けられるとき、金属プレートとセンサーの作動ゾーンの間にギャップが設定されます。通常、この距離はセンサーの直径を超えず、通常、センサーの直径の2〜3分の1になります。その直径。
接続方法に応じて、誘導型位置センサは 2 線式、3 線式、4 線式、5 線式になります。
2 線式は負荷を直接スイッチングします。 スターターコイルつまり、従来のスイッチと同じように機能します。 2 線式センサーは負荷抵抗が必要なため、信頼できるツールとして必ずしも適しているわけではありませんが、その関連性は失われません。
負荷は単にセンサーと直列に接続されます。定電圧が使用される場合は極性を観察することが重要です。交流極性が重要でない場合、主なものはスイッチングされた電力と電流です。
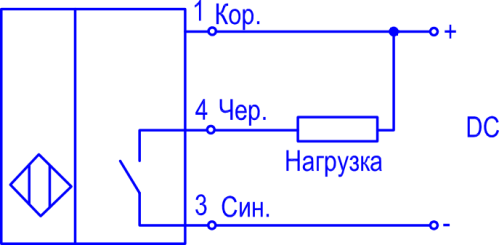
3 線式センサーには、センサー自体に電力を供給するための 3 本目のワイヤーがあり、これが最も一般的なソリューションです。 4 線式および 5 線式センサーには、負荷を接続するためのトランジスタまたはリレー出力があり、5 番目の線によりセンサーの動作モード、出力の初期状態を選択できます。
出力はリレーとトランジスタの両方が可能なため、センサは出力のデバイスに応じてリレー、npn、pnpの3つのタイプに分類されます。
リレー出力付きセンサー
リレー出力を備えたセンサーは、付属の回路から供給回路をガルバニック絶縁します。 1 本のワイヤを切り替え、スイッチ回路の電圧は特に重要ではありません。センサーの電源回路は電気的に絶縁されているため、これはリレーセンサーの利点と考えることができます。このタイプのセンサーは通常大型です。
PNPトランジスタ出力のセンサー
センサーの出力には PNP トランジスタがあり、正のワイヤと負荷を転流します。負荷は出力 PNP トランジスタのコレクタ回路に接続され、2 番目のリード線を介して負に永続的に接続されます。
npnトランジスタ出力のセンサー
センサーの出力には NPN トランジスタがあり、負のワイヤを負荷に転流します。負荷は出力 npn トランジスタのコレクタ回路に接続され、2 番目のリード線によって正のリード線に永久的に接続されます。
出力の初期状態に応じて、誘導型位置センサーは常閉接点または常開接点になります。初期状態とは、センサーがまだトリガーされていない、つまりセンサーが作動していない時点の状態を意味します。
出力接点が通常閉の場合、負荷はアイドル時に接続されます。出力接点が通常開の場合、センサーがトリガーされるまで負荷は遮断され、ドライブ (コンタクターなど) に電力は供給されません。通常閉接点は英語形式で指定されます — N.C. (ノーマルクローズ)、ノーマルオープン — N.O. (通常営業)。
このように、トランジスタ出力のセンサには、導電率(pnp または npn)による 2 種類と、出力の初期状態による 2 種類の 4 種類があります。また、電源のオン/オフに遅延が発生する場合があります。

センサーに接続されているドライブの種類および電源供給方法に応じて、センサーの論理は正または負になります。これは、デバイスの入力をアクティブにする電圧レベルによるものです。
アクチュエータの負のワイヤがグランド、つまりマイナスに接続されているときに入力がアクティブになる場合、そのロジックは負と呼ばれます。このような接続は、npn タイプのトランジスタ出力を備えたセンサの特徴です。
正ロジックは、アクティブ化されたときにドライブの正ワイヤを正電源に接続することに対応します。このロジックは、pnp トランジスタ出力を備えたセンサーに典型的です。ほとんどの場合、機構の位置に対する誘導センサーの動作には正の論理があります。
最も一般的に使用されている古いタイプの誘導式位置センサー
誘導型位置センサー IKV-22
誘導センサー IKV-22。これらのセンサーの動作は、磁気回路のエアギャップが変化すると、スチールコアを備えたコイルの誘導抵抗が変化するという原理に基づいています。
2 つのコイルを備えた磁気回路は鋼板上に取り付けられ、プラスチックのカバーで閉じられています。 2 つの MBGP コンデンサ (1 つは 15 μF、200 V の容量、もう 1 つは 10 μF、400 V の容量) がプレートの下側から取り付けられています。コンデンサーはカバーで覆われています。ケーブルはシールを介して接続されます。磁気シャントは機構に取り付けられており、その寸法は少なくとも厚さ2 mm、幅80 mm、長さ140 mmでなければなりません。磁気回路とシャント間のエアギャップは 6 ± 4 mm です。
通常、出力リレーは磁気シャントがセンサーを通過する瞬間にオン/オフされ、コイルの誘導抵抗の変化により電流共振が発生し、リレーコイルに流れる電流が低下します。これらのリレー: タイプ MKU-48、12 V AC、消費電流 0.45 A 以下、ドロップ電流 0.1 A 以上。センサー回路の電源電圧はAC24Vリレーです。
誘導型位置センサー ID-5
冶金工場では、ID-5 タイプの誘導センサーが使用され、最大 + 80 °C の周囲温度および最大 100% の湿度で動作するように設計されています。導電性の塵やスケールは許容されます。センサーにはUID-10タイプの半導体出力アンプを使用しています。アンプの出力電力 (25 W) は、広く普及している REV-800 リレー、コンタクタ KP21、MK-1 などをオンにするのに十分です。
センサーと観察される強磁性物体との間の空隙は最大 30 mm になることがあります。 ID-5 センサーの寸法は 187x170x70 mm、供給電圧は 220 V ± 15%、50 Hz です。
小型 BSP 非接触スイッチ
小型モーションスイッチ BSP-2 (ロジックエレメントへの非接触出力付き) および BRP (リレー PE-21 への出力付き、24 V、16 オーム) は、金属切断機で使用されます。
BSP-2 スイッチは、差動トランスセンサーと半導体トリガーで構成されています。最初のセンサー コイルの磁気システムは鋼板によって動かされ、2 番目のコイルはフラット アーマチュア機構に接続された磁気システム上を移動するときに操作されます。コイルは反対方向にオンになります。
アーマチュアがセンサーの上にある場合、コイルの誘導リアクタンスは等しく、差動トランスのセンサー出力はゼロになります。この場合、トリガーの出力には少なくとも 2.5 V の電圧が現れますが、これは論理要素が動作するには十分です。
センサーの上にアーマチュアがない場合、トリガーに電圧が印加され、トリガーが元の状態に戻ります。この場合、スイッチの出力信号はゼロになります。
BRP スイッチの動作原理は多くの点で BSP-2 と似ており、誘導センサー (差動トランスの回路による)、トリガー、アンプがボックス内に取り付けられています。巻き数の異なる二次コイルは、逆方向にスイッチオンされます。アーマチュアがセンサーの磁気システムに重なると信号が減少し、位相が変化した後、トリガーが切り替わり、外部出力リレー (PE-21、24 V、16 オーム) が作動します。
機構に固定されたアンカーの寸法は 80x15x3 mm です。アンカーとセンサーの間の隙間は 4 mm です。公称モードでのスイッチの精度は ± 0.5 mm、作動差は 5 mm 以内です。で。供給電圧と温度の変動により、BSP-2 および BRP スイッチの誤差は ±(2.5-f-3.0) mm に達する可能性があります。
高周波誘導センサー VKB
U 字型または平坦なアーマチュアを備えた VKB タイプの高精度誘導センサーは、金属切断機の自動化にも使用されます。内蔵変圧器の極は、開放電磁システムを形成します。作動エアギャップは 0.1 ~ 0.15 mm です。
変圧器の二次巻線からの出力電圧は、差動測定回路に供給され、次にトランジスタ増幅器に供給されます。 5 ~ 40 °C の温度変動と公称値の 85 ~ 110% の電圧によるセンサーの合計誤差は ± (0.064 ~ 0.15) mm で、応答の差は 0.4 mm を超えません。機構の最大移動速度は10m/mmです。センサー寸法は62x34x24 mm。電源電圧12V。
差動回路を備えた金属切断機用の特別なタイプの高精度誘導センサーの誤差は ± 0.01 mm 未満です。このようなセンサーには、電子ユニット上のセンサー ユニットで構成される VPB12 タイプの非接触モーション スイッチが含まれます。センサーユニットには、誘導仕事センサー、誘導補償センサー、プリント基板が含まれます。制御フェライト素子という機構を搭載しています。供給電圧 12 V DC。最大露光距離は 0.12 mm 以内です。 RPU-0 タイプのリレーをセンサー出力に接続できます。出力機器の最大負荷電流は0.16Aです。
発電機位置センサー
このタイプのセンサーはコンパクトで非常に正確です。 KVD-6M および KVD-25 シリーズ (スロット付き)、KVP-8 および KVP-16 (航空機) のセンサー ジェネレーターは、その効果が十分に証明されています。高濃度の湿気や粉塵が存在する場所での使用に適しています。センサーのトランジスタ回路の要素 (ジェネレーターとトリガー) は、耐衝撃性ポリスチレン製のハウジング内にあります。シールは低温硬化性コンパウンドで行われます。動作温度範囲は - 30 ~ +50 °C です。
HPC センサーは、金属プレート («フラグ») がスロットを通過するときに離散信号を生成し、トリガーの生成と切り替えに障害を引き起こします。スロットの幅は、KVD-6M センサーの場合は 6 mm、KVD-25 センサーの場合は 25 mm です。
KVP-8 センサーと KVP-16 センサーは、金属プレートがそれぞれ最大距離 8 mm と 16 mm で通過すると作動します。