単相および二相非同期モーター
単相非同期モーターの目的、装置、動作原理
単相誘導モーターは、同様の三相かご形モーターに似た設計の低電力機械です。
単相非同期モーターはステーターの配置が三相モーターとは異なり、二相巻線が磁気回路の溝に配置され、位相領域が120エルの主相または動作相で構成されます。雹が降ると、C1 と C2 とマークされたターミナル、および 60 el のフェーズ領域の補助フェーズまたは開始フェーズにつながります。雹が降ると、B1 と B2 とマークされた端末につながります (図 1)。
これらの巻線相の磁軸は、角度 0 = 90 el だけ互いにオフセットされています。雹。交流電圧ネットワークに接続された動作相は、回転子を回転させることができません。その電流が、時間とともに調和的に変化する磁気誘導を特徴とする固定対称軸を持つ交流磁場を励起するからです。
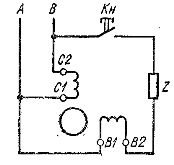
米。 1. 単相かご形誘導電動機の回路図。
この磁場は 2 つの成分で表すことができます。つまり、磁気誘導によって回転し、同じ速度で反対方向に回転する、正逆シーケンスの同一の円形磁場です。ただし、ローターが必要な方向に事前に加速されている場合、作動フェーズがオンになるとローターは同じ方向に回転し続けます。
 このため、単相モーターの始動は、スタート ボタンを押してローターを加速することで始まり、ステーター巻線の両相に電流が励起され、モーターのパラメーターに応じた量だけ位相がシフトされます。移相装置 Z は、抵抗器、インダクタ、またはコンデンサの形で作られ、固定子巻線の動作相と始動相を含む電気回路要素となります。これらの電流は、空隙内の磁気誘導により機械内に回転磁界を引き起こします。回転磁界は最大値と最小値の範囲内で周期的かつ単調に変化し、そのベクトルの終点は楕円を描きます。
このため、単相モーターの始動は、スタート ボタンを押してローターを加速することで始まり、ステーター巻線の両相に電流が励起され、モーターのパラメーターに応じた量だけ位相がシフトされます。移相装置 Z は、抵抗器、インダクタ、またはコンデンサの形で作られ、固定子巻線の動作相と始動相を含む電気回路要素となります。これらの電流は、空隙内の磁気誘導により機械内に回転磁界を引き起こします。回転磁界は最大値と最小値の範囲内で周期的かつ単調に変化し、そのベクトルの終点は楕円を描きます。
それ。楕円形の回転磁界は、短絡した回転子巻線のワイヤ内の EMF と電流を検出します。これは、この磁界と相互作用して、界磁の回転方向への単相モーターの回転子の加速を確実にします。数秒でほぼ公称速度に達します。
スタートボタンを放すと、電気モーターは二相モードから単相モードに移行します。このモードは、回転中に滑りにより回転ローターよりわずかに前方にある交流磁界の対応する成分によってさらにサポートされます。
単相非同期モーターの固定子巻線の始動相を電力網から適切なタイミングで切り離すことは、その設計上、短期間の動作モード (通常は最長 3 秒) を提供するために必要ですが、これにより長時間の停止は除外されます。許容できない過熱、絶縁体の焼損、損傷による負荷がかかっている。
単相非同期モーターの動作の信頼性は、VT および B2 とマークされた端子に接続された遮断接点を備えた遠心スイッチと、PT および C1 とマークされた端子を備えた同様の接点を備えたサーマル リレーを機械ケースに組み込むことによって実現されます (図 2、図 2)。 CD)。
遠心スイッチは、ローターが定格速度に近い速度に達すると、B1 および B2 とマークされた端子に接続されている固定子巻線の開始相を自動的に切断します。また、加熱時にサーマル リレーが固定子巻線の両相を主電源から切断します。許容範囲よりも高い。
ローターの回転方向の反転は、スタートボタンを切り替えて電気モーターの端子上の金属プレートを再配置することによって始動するときに、ステーター巻線のいずれかの相の電流の方向を変えることによって実現されます(図2)。 2、a、b)、または 2 つの同様のプレートを再配置することによってのみ(図 2、c、d)。
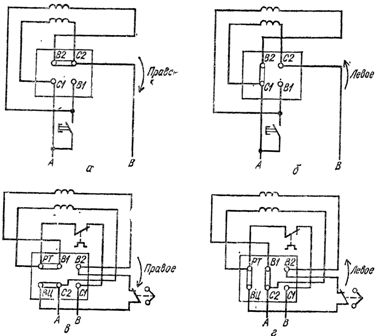
米。 2. リス型回転子を備えた単相非同期モーターの固定子巻線の各相の端子と回転子回転のための接続のマーク: a、c - 右、b、d - 左。
単相非同期モーターと三相非同期モーターの技術的特性の比較
単相非同期モーターは、定格出力が同様の三相機械とは異なり、初期トルク係数 kn = МХ / Mnom が減少し、初期電流係数 ki = Mi / Mnom が増加します。これらは、初期位相を備えた単相電気モーター用です。増加した直流抵抗と動作相の低いインダクタンスによる固定子巻線の kn — 1.0 — 1.5 および ki = 5 — 9 が重要です。
単相非同期モータは、固定子巻線の初相が 2 相に相当する単相機の起動時に楕円形の回転磁界が励起されるため、三相非同期モータに比べて起動特性が悪くなります。不均一な円形の回転磁場は、直接またはその逆にブレーキ効果を引き起こします。
 固定子巻線の動作相と始動相の電気回路の要素のパラメーターを選択することにより、始動時に円形の回転磁界を確実に励起することができます。これは、位相シフト要素を使用することで可能になります。適切な容量を持つコンデンサの形で。
固定子巻線の動作相と始動相の電気回路の要素のパラメーターを選択することにより、始動時に円形の回転磁界を確実に励起することができます。これは、位相シフト要素を使用することで可能になります。適切な容量を持つコンデンサの形で。
ロータの加速により機械回路のパラメータが変化すると、回転磁界が円形から楕円形に変化し、モータの始動特性が低下します。したがって、公称約 0.8 の速度では、電気モーターの固定子巻線の開始相が手動または自動でオフになり、その結果モーターは単相動作に切り替わります。
始動コンデンサ付きの単相非同期モーターの初期始動トルク kp = 1.7 ~ 2.4 の倍数と、初期始動電流 ki = 3 ~ 5 の倍数があります。
二相非同期モーター
二相非同期モーターでは、相面積が 90 el の固定子巻線の 2 相が使用されます。挨拶は労働者です。それらはステーターの磁気回路の溝に配置されており、その磁軸は 90 エルの角度を形成します。雹。固定子巻線のこれらの相は、モータの定格モードでの合計電力は同じですが、巻数だけでなく定格電圧と電流も互いに異なります。
固定子巻線の相の 1 つに永久コンデンサ Cp (図 3、a) があり、モータの公称モードの条件下で円形の回転磁界を励起します。このコンデンサの容量は次の式で求められます。
°Cp = I1sinφ1 / 2πfUn2
ここで、I1 と φ1 - それぞれ、円形回転磁界におけるコンデンサのない固定子巻線の位相回路の電圧と電流の間の電流と位相シフト、I と ti - 交流の周波数と電源の電圧n- 変換係数 — コンデンサありとコンデンサなしのそれぞれの固定子巻線の相の実効巻数の比。次の式で決定されます。
n = kvol2 w2 / ktom1 w1
ここで、коб2 および коб1 — 巻数 w2 および w1 の固定子巻線の対応する相の巻線係数です。
主電源電圧 U を超える円形回転磁場を持つ二相誘導電動機の巻線相と直列に接続されたコンデンサ端子電圧 Uc は、次のように決定されます。
Uc = U √1 + n2
公称負荷以外のモーター負荷への移行には、回転磁界の変化が伴い、回転磁界は円形から楕円形になります。これによりエンジンの作動性が低下し、始動時の初期回転数が低下します。 始動トルク MP <0.3Mnom までに制限されており、永続的に接続されたコンデンサ モータの使用は、始動条件が穏やかな設備でのみ制限されます。
初期トルクを増加させるために、始動コンデンサ Cn が動作コンデンサ Cp と並列に接続されます (図 3、b)。その容量は動作コンデンサの容量よりもはるかに大きく、初期始動の設定に依存します。トルクを 2 以上に増やすことができます。
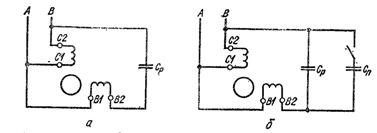
米。 3. かご型ローターを使用して二相非同期モーターをオンにするためのスキーム: a — 恒久的に接続されたコンデンサーを使用する場合、b — 運転および始動用コンデンサーを使用する場合。
ロータが公称始動コンデンサの 0.6 ~ 0.7 の速度まで加速すると、円形の回転磁界が楕円形の回転磁界に変化してモータの動作が低下するのを避けるために、ロータがオフになります。
このようなコンデンサ モータの始動モードは、次のパラメータによって特徴付けられます: kn = 1.7 — 2.4 および ki = 4 — 6。
コンデンサ モータは、固定子巻線に最初のベールを備えた単相モータよりもエネルギー特性が優れているという特徴があり、コンデンサを使用しているため力率は同じ電力の三相モータよりも高くなります。
汎用非同期モーター
自動制御設備では、三相または単相ネットワークに接続された低電力の三相機械である汎用非同期モーターが使用されます。単相ネットワークから電力を供給する場合、モーターの始動特性と動作特性は、三相モードで使用する場合よりもわずかに悪くなります。
UAD シリーズのユニバーサル非同期モーターは 2 極および 4 極で製造されており、三相モードの公称電力は 1.5 ~ 70 W、単相モードの場合は 1 ~ 55 W で、交流で動作します。周波数 50 Hz、効率 η= 0.09 — 0.65 の電圧ネットワーク。
影付きまたは影付きの極を備えた単相非同期モーター
分割または陰影付きの極を備えた単相誘導モーターでは、各極は深い溝によって 2 つの不均等な部分に分割され、極の磁気回路全体を覆う単相巻線と、その小さい部分に配置された短絡巻線が取り付けられます。
これらのモーターのローターには短絡巻線があります。固定子巻線に正弦波電圧を加えると、固定子巻線に電流が流れ、固定対称軸を持つ交流磁界が励起され、短絡ループに対応する起電力と電流が誘導されます。
短絡電流の影響下で、対応する m.d. が磁場を励起し、シールドされた高周波極における主磁場の強化と弱化を防ぎます。極のシールドされた部分とシールドされていない部分の磁場は時間的に位相がずれており、空間的にシフトされて、結果として極のシールドされていない部分の磁軸から磁軸の方向に移動する楕円形の回転磁場を形成します。シールド部分の。
この磁界とロータ巻線に誘導される電流の相互作用により、初期トルク Mn = (0.2 — 0.6) Mnom が発生し、モータ シャフトにブレーキ トルクが加えられない場合、ロータが定格速度まで加速します。始動トルクを超えること。
分割極または陰極を備えた単相非同期モーターの初期始動トルクと最大トルクを増加させるために、鋼板の磁気シャントが極の間に配置され、回転磁界が円形に近づきます。
影付きのポールモーターは非可逆的なデバイスであり、頻繁な始動や突然の停止が可能であり、長時間遅延する可能性があります。これらは 0.5 ~ 30 W の 2 極および 4 極の定格電力で作られており、ηnom = 0.20 ~ 0.40 の効率で周波数 50 Hz の交流電圧ネットワークから動作するために最大 300 W まで改良された設計で作られています。
こちらもお読みください: セルシンス: 目的、装置、行動原理
