セルシンス: 目的、装置、行動原理
 セルシンは、数ワットから数百ワット(1 キロワット未満)の電力を供給する特殊なタイプの交流電気機械です。 selsyn は、互いに機械的に接続されていないデバイス間で機械的回転角度を電気的にリモートで送信するために機能します。
セルシンは、数ワットから数百ワット(1 キロワット未満)の電力を供給する特殊なタイプの交流電気機械です。 selsyn は、互いに機械的に接続されていないデバイス間で機械的回転角度を電気的にリモートで送信するために機能します。
各セルシンにはステーターとローターがあり、その上に交流巻線が配置されています。ステータに 1 つの巻線を備えたコイルと、ロータに 3 つの巻線を備えた巻線があり、その逆、ステータに 3 つの巻線を備えた巻線、ロータに 1 つの巻線を備えた巻線、そして最後に 1 つの巻線を備えたコイルがあります。ステーターには 3 つの巻線があり、ローターにも同じ巻線があります。
自動制御スキームの目的に応じて、selsyn は次のように分類されます。
- セルシンセンサー、
- セルシン受信機
- 差分。
selsyn の動作を理解するには、図を考慮してください。 1、a.
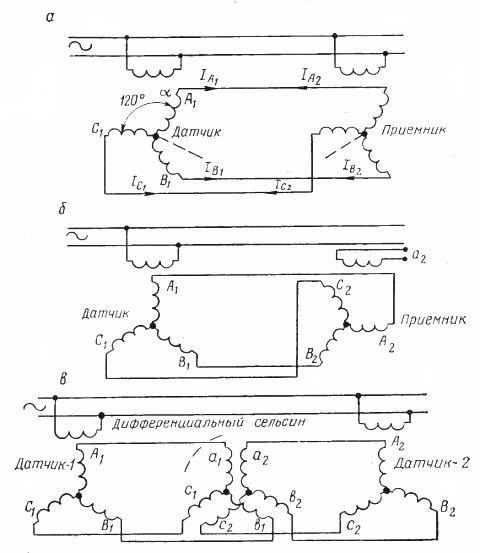
米。 1. セルシンをオンにするためのスキーム: システムセンサーによると受信機。 b — 変圧器モードの変圧器受信機。 c — 差動
単一巻線ステータ巻線を備えた selsyn センサーと selsyn レシーバーは同じ AC ネットワークに接続され、3 巻線ローター巻線は相互に接続されています。ここでセンサー ローターを任意の角度に回転すると、受信機ローターも同じ角度に回転します。センサーローターがランダムな速度で連続的に回転すると、受信機ローターも同じ速度で回転します。
セルシン接続の動作は電磁誘導の原理に基づいており、次のとおりです。単巻線ステータ巻線の交流は 3 巻線ロータ巻線に電流を誘導します。その値はロータ巻線とステータ巻線の相対位置によって異なります。
2 つのセルシンの回転子が固定子に対して等間隔に配置されている場合、回転子の接続線の電流は等しく、互いに逆向きであるため、各コイルの電流はゼロになります。その結果、両方のセルシンの軸トルクはゼロになります。
ここでセルシンセンサーのローターを手動などで特定の角度に回すと、ローター間の電流のバランスが崩れ、セルシンレシーバーのシャフトにトルクが発生し、これによりローターが回転します。電流の不均衡が解消されるまで、つまり、このローターがシンクロセンサーと同じ位置になるまで。

自動調整システムでは、selsyn 受信機は多くの場合、変圧器モードで動作します (図 1、b)。この場合、受信機の回転子は固定され、その固定子巻線はネットワークから切り離されます。このコイルでは e が誘導されます。等v. ローターの側面。セルシンセンサーのローターの位置により電流が巻線を通って流れます。これは e の値を意味します。等端子を使用すると、受信機のローターはセンサーの回転角度に比例します。
初期位置では、ローターは相互に 90 ° ずれています。この場合、e.等s.はゼロです。ローターセンサーが回転すると、e が受信ローターに誘導されます。等Ep はローターの発散角に比例
Epr = Emax x sinθ
差動セルシンは、2 つの軸の回転角度の差を制御する必要がある場合に使用されます。彼らの矛盾。この場合、2 つのセルシン センサーが 2 つのシャフトに配置され、互いの速度が比較されます。これらのセルシンの回転子は、3 番目のステーターの 3 巻線巻線と 3 番目の回転子に 3 巻線で接続されます。 selsin、差動です (図 1、in)。セルシン・ディファレンシャル・ローターの回転角は、セルシン・センサーの回転角の差に等しい。