制御スキームを設計するための直感的な方法
 直感的な方法 — さまざまな設計組織でさまざまなメカニズムの自動化において得られた経験に基づいて制御スキームを開発する方法。それは設計者の工学的直観に基づいています。
直感的な方法 — さまざまな設計組織でさまざまなメカニズムの自動化において得られた経験に基づいて制御スキームを開発する方法。それは設計者の工学的直観に基づいています。
これまでの経験をすべて吸収し、計画を立てるという点で一定の能力を持ち、抽象的に考えて論理的に推論できる人だけが、この方法を完全に習得できます。その複雑さにも関わらず、ほとんどの電気設計者はこの直感的な方法を広く使用しています。
たとえば、プッシュレバーの簡略化された運動図を考えてみましょう (図 1)。ホイール5が時計回りに回転すると、レバー4がレバー1を軸Oの周りに回転させ、それによってレバー2とともにシュー3を強制的に並進させる。ホイール5がさらに回転すると、レバー1の移動方向が変わり、シューが元の位置に戻り、その後エンジンを停止する必要がある。
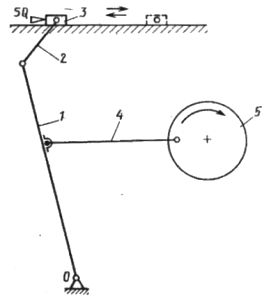
米。 1. レバープッシャー制御の概略図
考慮されている機構は、押し込み装置の典型的な代表例です。最初のサイクルでは、メカニズムがオンになり、実行されます。 2番目の小節では機能しません。機構が働かないサイクルをゼロといいます。シューは完全に往復(前後)しますが、非可逆電気モーターを推進に使用できます。
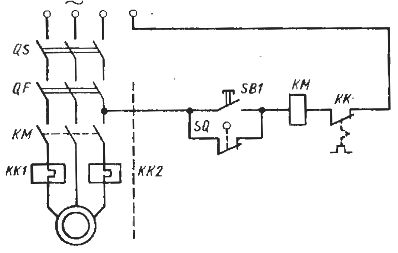
レバーピストン電動モーターの制御回路は、電源回路と制御回路の 2 つの部分 (図 1 では点線で区切られています) で構成されます。
電源回路の要素の目的を考慮してください。三相電流は QS スイッチに供給され、磁気スターターの修理または損傷の場合に電気モーターへの電力供給を遮断します。次に、図に示されている QF リリースが示されている回路ブレーカーに電流が流れます。短絡電流が発生した場合にドライブへの電源を保護し、切断するように設計されています。電磁スタータ KM の主接点は、電気モータ M の巻線をオンまたはオフにします。
サーマル リレー KK1 および KK2 (電源回路に発熱体が示されている) は、電気モーターを長時間の過負荷から保護するように設計されています。
制御スキームは次のように機能します。スタートボタン SB1 を押すと、電磁スタータ KM のコイルが通電され、KM の電源回路の接点が閉じ、電流がモータ巻線に入ります。モーターのローターが回転し、ドラムが前進を始めます。同時にリミットスイッチSQのレバーから離れ、接点が閉じます。
スタートボタン SB1 が放されてその接点が開くと、磁気スターターの KM コイルはリミットスイッチ SQ の接点を介して電力を受け取ります。ピストンが前進後後退すると、リミットスイッチ SQ のレバーが押され、接点が開き、KM のコイルがオフします。これにより、電源回路の KM 接点が開き、電気モーターが停止します。
検討中の回路には、電源回路と制御回路が含まれています。将来的には、制御スキームのみが検討される予定です。
機能別、つまり目的に応じて、回路の動作に関与するすべての要素は、制御接点、中間要素、実行要素の 3 つのグループに分類できます。
制御接点はコマンドを発行する要素です (コントロールボタン、スイッチ、リミットスイッチ、一次コンバータ、リレー接点など)。
中間要素の名前自体が、それらが制御要素と実行要素の間の中間の位置を占めることを示しています。リレー接点回路にはタイムリレーと中間リレーが含まれ、非接触回路には— 論理ゲート.
実行要素は実行メカニズムです。ただし、制御回路を開発する場合、駆動機構自体(電気モーターや発熱体)は使用されませんが、それらを含むデバイス、つまり駆動機構が使用されます。電磁開閉器、接触器など
すべての制御接点は、その機能原理に従って、ショート アクションのスタート コンタクト (PC)、ロング アクションのスタート コンタクト (PD)、ショート アクションのストップ コンタクト (OK)、ロング アクションのストップ コンタクト (OD) の 5 つのタイプに分類されます。 )、アイドリングストップ接点(ソフトウェア)。これらの連絡先はメイン連絡先と呼ばれます。
周期機構の制御におけるすべての典型的な接点の動作のサイクログラムを図に示します。 2.
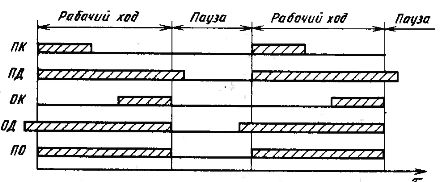
米。 2.制御接点のサイクログラム
5 つの接点はそれぞれ、特定の瞬間に動作を開始 (クローズ) し、終了 (オープン) します。したがって、スタート接点は動作ストロークの開始と同時に動作を開始しますが、YAK接点は動作ストロークOD中、つまり一時停止中、つまりスイッチオフの瞬間のみ相互に異なります(オープニング)。
停止接点は、始動接点とは異なり、動作ストロークの終了と同時に動作を停止しますが、挿入 (閉成) の瞬間が異なります。停止接点 OK は作業ストローク中に動作を開始し、接点 OD - は一時停止中に動作を開始します。ソフトウェアの接触だけが、作業過程の開始とともに作業を開始し、作業の終了とともに終了します。
考慮された 5 つの主要な連絡先の助けを借りて、実行要素と中間要素を制御するための 4 つのスキームを取得することができます。これらは、典型的なスキームと呼ばれます (図 3)。

米。 3. 実行回路と中間回路の一般的な制御方式
最初の典型的な回路 (図 3、a) には、ソフトウェア制御接点が 1 つだけあります。閉じているとアクチュエータ X に電流が流れ、開いていると電流が流れません。 PO 接点には独自の意味があり、他のすべての接点はペア (スタートとストップ) で使用する必要があります。
2 番目の典型的な回路には、連続動作を行う 2 つの制御接点 PD と OD があります (図 3、b)。
3 番目の典型的な回路は、コンピュータの開始接点と停止接点 OD で構成されます。この回路には、制御接点に加えて、ブロッキング接点 x が含まれている必要があります。ブロッキング接点 x を介して、アクチュエータ X はコンピュータの開始接点の後も電力を受け取り続けます。コンピュータが開きます (図 3、c)。
4 番目の典型的なスキームは、並列接続された 2 つの短期的な接触、つまりコンピュータの起動と停止 OK に基づいています (図 3、d)。
与えられた 4 つの典型的なスキームにより、(立方体からのように) 接点を制御するための複雑な並列直列スキームを構成できます。したがって、たとえば、検討中のレバー制御スキーム(図 1 を参照)は、4 番目の典型的なスキームに基づいています。短期スタート接点として押しボタンSB1、短期ストップ接点としてSQリミットスイッチを使用します。
直感的な方法で制御スキームを作成する場合、制御接点の種類、つまりその動作の持続時間を正確に決定する必要があります。
典型的なスキームを使用した直感的な方法で制御スキームを開発する例を考えてみましょう。
インダクターを制御する半自動装置と、高周波電流で製品を加熱し、ウォータージェットで冷却するように設計された設備にスプレーする装置を開発する必要があるとします。インダクタ内での製品の加熱時間は 12 秒、冷却時間は 8 時間で、製品は手動でインダクタに取り付けられます。
まず、半自動デバイスの動作を分析し、すべての実行要素と中間要素を決定します。作業者は製品を手動でインダクタに取り付け、スタートボタンを押します。この時点で、インダクタがオンになり、製品の加熱が始まります。同時に、加熱時間 (12 秒) を考慮して、時間リレーもオンになる必要があります。
今回はリレー (より正確にはその接点) がインダクターをオフにし、冷却用の水を供給するスプリンクラーをオンにします。同時に、冷却時間をカウントダウンする、つまり噴霧器をオフにするために、2 番目のリレーをオンにする必要があります。このように、インダクタ、スプレー装置、2 つの時間リレーの 4 つの要素を制御する必要があります。
インダクタはコンタクタを介してオン/オフに切り替えられるため、コンタクタを制御する必要があります。噴霧器は電磁弁によって制御されます。
コンタクタKM1のコイル(コイル)、電磁弁KM2のコイル、タイムリレーKT1、K.T2のコイルをそれぞれ指定しましょう。したがって、KM1 と KM2 という 2 つのアクチュエータと、KT1 と KT2 という 2 つの中間要素があります。
実行された分析から、最初に加熱を開始する必要がある、つまりコイル KM1 が励起されることがわかります。 SBトリガーボタン(ショートアクション)をスタート接点として使用します。したがって、第3または第4の典型的な方式のいずれも適用可能である。
インダクタをタイムリレー KT1.1 の接点 (この場合は長時間動作接点) から切り離します。したがって、3 番目の典型的なスキームを選択します。電磁スタータ KM1 の巻線と同時にタイムリレー KT1 をオンにする必要がありますが、これらを並列に接続することで非常に簡単に行うことができます。
結果として得られる回路の動作を考えてみましょう (図 4、a)。
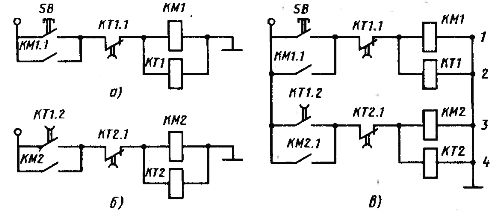
米。 4.制御回路: a — 加熱時間用のインダクターとリレー、b — スプリンクラー装置とリレーの冷却時間、c — 設置全体
スタートボタンSBを押すとコンタクタKM1のコイルが通電され、製品の加熱が始まります。同時にタイムリレーKT1のコイルが通電され、加熱時間のカウントダウンを開始する。遮断接点KM1.1の助けにより、コイルKM1の電圧はトリガーボタンSBを放した後でも維持されます。連絡先を開いた後。
加熱時間が経過すると、タイムリレー KT1 が動作し、その接点 KT1.1 が開きます。これにより、KM1 コイルがオフになります (製品の加熱が終了します)。これで噴霧器の電源がオンになります。タイムリレーKT1の接点を閉じることでONすることができます。噴霧器の電源がオンになると、タイムリレー KT1 がオフになります。したがって、閉接点 KT1.1 は短期接点になります。したがって、ここでも 3 番目の典型的なスキームを使用します。
噴霧器と同時に、冷却時間をカウントダウンするタイムリレー KT2 をオンにする必要があります。この目的のために、応用技術を使用して、タイムリレー KT2 のコイルをコイル KM2 と並列に接続します。したがって、2 番目の制御スキームが得られます (図 4、b)。 2 つの回路 (図 4、a と b) を組み合わせると、一般的な制御スキーム (図 4、c) が得られます。
ここで、回路全体の動作を考えてみましょう (図 4、c)。 SB スタートボタンを押すと、コンタクタ KM1 とタイムリレー KT1 のコイルが通電され、製品が加熱されます。12 秒後、タイムリレー KT1 が動作し、回路 1 の接点が開き、回路 2 の接点が閉じます。製品が冷え始めます。電磁弁のコイルKM2と同時にタイムリレーKが通電T2し、冷却時間をカウントダウンし、接点KT2.1(回路3)が開くとバルブKM2とタイムリレーKT2がOFFし、回路は元の位置に戻ります。
結果として得られたインダクターとスプリンクラーの制御スキームは、直感的な方法を使用して開発されました。ただし、このスキームが正しく最適であるという証拠はありません。回路の操作性の問題は、回路の製造と慎重な実験検証の後にのみ解決できます。これはまさに、直感的な方法の最大の欠点です。指摘された欠点は、この分析方法には存在しません。制御スキームを開発するための分析方法については、次の記事で説明します。