天井クレーン付き電動トロリードライブ
天井クレーンを備えたトロリーは、吊り上げ装置の独立した要素であり、技術的に決定された移動速度と荷物の位置決めに必要な精度で、天井クレーンの範囲内で荷物を移動するように設計されています。ボギードライブは天井クレーン装置の主要コンポーネントの 1 つです。
トロリーは天井クレーンの軌道上を移動します。ブリッジ自体は、カートの移動方向に対して垂直な方向に移動します。カートには昇降機構が装備されており、フック(または電磁石)を使用して荷物を移動できます。台車の動きは天井クレーンの技術サイクルに不可欠な部分です(図1)。
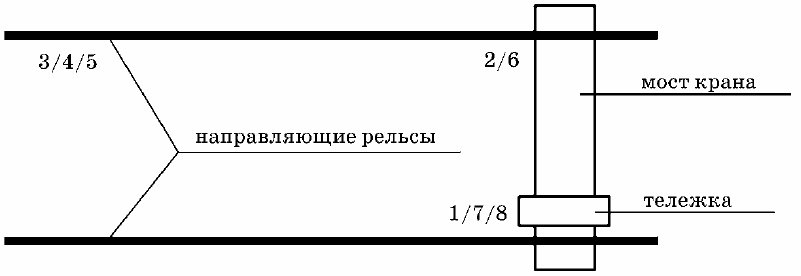
米。 1. 作業サイクルで橋形クレーンを使用して作業を実行するスキーム
このサイクルは次の操作で構成されます (図 1 では、操作番号は数字で示されています)。
1 — 荷物を持ち上げる。
2 — カートを所定の位置に移動します。
3 - クレーンを所定の位置に移動する。
4 — 荷物の重量を軽減する。
5 — 荷物の重みでフックを持ち上げます。
6 — クレーンを元の位置に移動します。
7 — カートを元の位置に移動します。
8 — フックを下げる。
天井クレーンのプロセスサイクルから分かるように、2回目と7回目の動作でトロリ駆動モータがオンとなる。台車が天井クレーンの距離内の所定の位置に近づくと、台車駆動装置の電動モーターに電気的にブレーキがかかり、必要な制動精度が確保されます。
その後、エンジンが停止され、機械ブレーキがかかります。さらに、橋の動きの電気駆動がオンになり、技術的タスクに従って荷物が作業場に沿って移動します。指定された場所に到着すると、クレーンが停止し、荷物が降下され、必要な技術的作業が実行されます。

天井クレーンを備えたトロリー移動機構の運動図を図 2 に示します。トロリー移動機構は、駆動輪間の中央にギアボックスを備えたスキームに従って作成されます。
電気モーター D からの駆動力は、ブレーキディスク T、ギアボックス P、クラッチ M、シャフト B を介して走行輪に伝達されます。ブレーキプーリーはカートを静止状態に保つために使用されます。
カートには 4 つの走行輪と 2 つの駆動輪が付いています。クレーン台車の走行車輪は通常2本のリブで作られています。
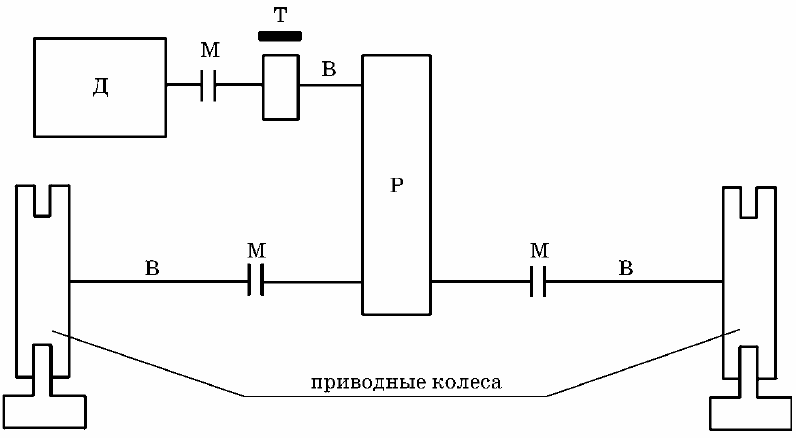
米。 2. トロリー移動機構の運動図
カートを指定位置まで移動する時間は、カートを必要な加速度で加減速する時間を考慮して決定します。技術プロセスの条件に基づいて、カートを移動するときのタコグラムは図 3 に示す形式になるはずです。
ボギー機構が必要な加速度で所定の速度までスムーズに始動することを保証する必要があります。必要な位置決め精度を確保するには、減速速度に移行して電気駆動装置を滑らかに減速し、その後トロリーが停止する必要があります。
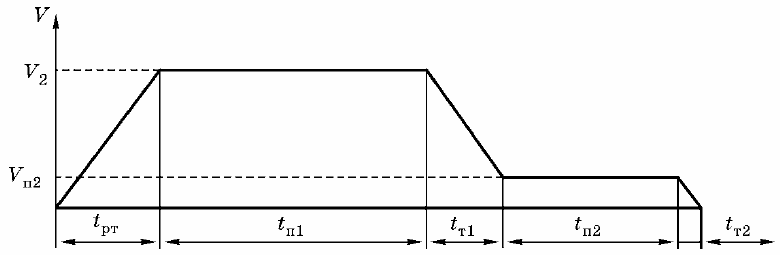
米。 3. トロリ移動機構のタコグラム
レール接続部の金属構造への衝撃を伴う台車の動き、激しい加速と減速、機械に負荷がかかるときの金属構造の固有振動は、橋形クレーンの台車にある電気機器に非常に強い機械的衝撃を引き起こします。これに基づいて、トロリーを移動させるための電気駆動装置は次の要件を満たす必要があります。
1) 電気駆動装置は、必要な加速度 (m / s2) と正確な位置決め精度 (mm) で、動作中の機構を開始し、動きの方向を逆転させ、機構を停止する機能を提供する必要があります。
2) 電気駆動装置は、メインからスムーズな速度制御を提供する必要があります。
3) 開発されたエンジントルクは、所定の強度で機構が動作することを保証する必要があります。
4) 1 時間当たりの所定のエンジン始動回数において、巻線が過熱してはならず、そのために機構が長時間停止する可能性があります。
5) モーターは動作条件に従って選択する必要があります。つまり、モーターは適切な設計でなければならず、その巻線は耐熱性と湿気に対する絶縁性を備えていなければなりません。
6) 駆動モーターは、頻繁な駆動始動時に過渡現象の流れに大きな影響を与えるフライホイールの質量を最小限に抑える必要があります。
7) 駆動モーターは走行機構の出力に適合し、必要な過負荷容量を備えていなければなりません。
8) 電気駆動装置は、最小限の持続時間で過渡プロセスの形成を保証する必要があります。
9) 電気駆動装置の設計では、安全性とメンテナンスの容易さを考慮する必要があります。

生産施設の水平軌道線上で動作する運動機構の静モーメントは、ベアリング内の滑り摩擦力と、天井クレーンのレール上を転がる台車車輪の転がり摩擦によって生成されます。トロリーが前進する際の機構の静的モーメントは、クレーンの吊り上げ能力によって決まります。台車逆転時の機構の静モーメントを不完全荷重として計算します。
天井クレーンのトロリーの電気駆動用、非同期かご型ローター モーター (含む) 可変周波数ドライブの一部として)、巻線回転子誘導電動機、および独立励磁 DC 電動機。