電動機用周波数変換器
周波数変換器の使用に関する技術的側面
 現在、誘導モーターはほとんどの電気駆動装置の主要なデバイスとなっています。制御に周波数コンバータ、つまり PWM レギュレーションを備えたインバータが使用されることが増えています。このような制御には多くの利点がありますが、特定の技術的ソリューションを選択する場合にはいくつかの問題も生じます。それらをさらに詳しく理解してみましょう。
現在、誘導モーターはほとんどの電気駆動装置の主要なデバイスとなっています。制御に周波数コンバータ、つまり PWM レギュレーションを備えたインバータが使用されることが増えています。このような制御には多くの利点がありますが、特定の技術的ソリューションを選択する場合にはいくつかの問題も生じます。それらをさらに詳しく理解してみましょう。
周波数変換器の装置
幅広い強力な高電圧トランジスタ IGBT モジュールの開発と生産により、デジタル信号によって直接制御される多相パワー スイッチの実装が可能になりました。プログラマブル コンピューティング機能により、信号を提供するスイッチ入力で数値シーケンスを生成することが可能になりました。 非同期電動機の周波数制御… 大規模なコンピューティング リソースを備えたシングルチップ マイクロコントローラーの開発と量産により、デジタル コントローラーを備えたサーボ ドライブへの移行が可能になりました。
電力周波数コンバータは、原則として、強力なダイオードまたはパワートランジスタに基づく整流器と、ダイオードで分路されたIGBTトランジスタに基づくインバータ(制御スイッチ)を含むスキームに従って実装されます(図1)。
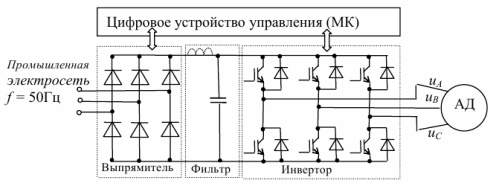
米。 1. 周波数変換回路
入力段は、供給された正弦波グリッド電圧を整流します。この電圧は、誘導性容量性フィルターで平滑化された後、制御されたインバーターの電源として機能し、次の信号を生成します。 パルス変調、電気モーターの必要な動作モードを提供するパラメーターを使用して、固定子巻線に正弦波電流を生成します。
電力コンバータのデジタル制御は、当面のタスクに対応するマイクロプロセッサ ハードウェアとソフトウェアを使用して実行されます。コンピューティング ユニットは、52 個のモジュールの制御信号をリアルタイムで生成し、ドライブの動作を制御する測定システムからの信号も処理します。
電源と制御コンピュータは、周波数コンバータと呼ばれる構造的に設計された工業製品に組み込まれています。

産業機器で使用される周波数コンバータには、主に 2 つのタイプがあります。
-
特定のタイプの機器用の独自のコンバータ。
-
ユニバーサル周波数コンバータは、ユーザー定義モードで AM 動作を多機能に制御できるように設計されています。
周波数変換器の動作モードの設定と管理は、入力した情報を表示する画面を備えたコントロール パネルを使用して行うことができます。単純なスカラー周波数制御の場合、コントローラの工場出荷時設定および内蔵 PID コントローラで利用可能な一連の単純な論理関数を使用できます。
フィードバックセンサー信号を使用してより複雑な制御モードを実装するには、接続された外部コンピューターを使用してプログラムされるACS構造とアルゴリズムを開発する必要があります。
ほとんどのメーカーは、入出力の電気特性、電力、設計、その他のパラメータが異なるさまざまな周波数コンバータを製造しています。追加の外部要素を使用して、外部機器 (主電源、モーター) に接続できます: 磁気スターター、変圧器、チョーク。
制御信号の種類
さまざまな種類の信号を区別し、それぞれに別のケーブルを使用する必要があります。異なるタイプの信号は相互に影響を与える可能性があります。実際には、この分離は一般的です。たとえば、 圧力センサー 周波数変換器に直接接続できます。
図では。図 2 は、さまざまな回路や制御信号が存在する場合に周波数コンバータを接続するための推奨方法を示しています。

米。 2. 周波数変換器の電源回路と制御回路の接続例
次のタイプの信号を区別できます。
-
アナログ - 電圧または電流信号 (0 ~ 10 V、0/4 ~ 20 mA)。値がゆっくりまたはほとんど変化しません。通常、これらは制御信号または測定信号です。
-
個別の電圧または電流信号 (0 ~ 10 V、0/4 ~ 20 mA)。めったに変化しない 2 つの値 (高または低) のみを取ることができます。
-
デジタル (データ) - 急速かつ高周波数で変化する電圧信号 (0 ~ 5 V、0 ~ 10 V)。通常、これらはポート RS232、RS485 などからの信号です。
-
リレー - リレー接点 (0 ~ 220 V AC) には、接続された負荷 (外部リレー、ランプ、バルブ、ブレーキなど) に応じて誘導電流が含まれる場合があります。
周波数変換器の電力選択

実際のデバイスには、起動時など、デバイスの現在の負荷が増加する可能性のある多くの側面があります。原理的には、周波数ドライブを使用すると、ソフトスタートによる電流と機械的負荷を軽減できます。たとえば、始動電流は定格電流の 600% から 100 ~ 150% に減少します。
速度を落として運転する
モーターが低速で動作している場合、周波数コンバーターは簡単に 10:1 の速度調整を提供しますが、それ自体のファンの出力では十分ではない可能性があることに注意してください。エンジン温度を監視し、強制換気を行います。
電磁適合性

非常用発電機から電力を供給されています
周波数変換器によって提供されるソフトスタートにより、発電機に必要な電力を削減できます。このような始動では電流が4〜6分の1に減少するため、発電機の電力も同様の数だけ減らすことができます。ただし、発電機とドライブの間にコンタクタを設置し、周波数ドライブのリレー出力によって制御する必要があります。これにより、周波数変換器が危険な過電圧から保護されます。
単相ネットワークから三相コンバータへの供給
三相周波数コンバータは単相ネットワークから電力を供給できますが、その出力電流は定格電流の 50% を超えてはなりません。

エネルギーとお金を節約
節約にはいくつかの理由があります。まず第一に、成長のためです。 コサインファイ 値を 0.98、つまり最大の電力は有用な作業を行うために使用され、最小の電力は無駄になります。第 2 に、これに近い係数がすべてのエンジン動作モードで得られます。
周波数コンバータがなければ、低負荷時の非同期モーターのコサイン ファイは 0.3 ~ 0.4 になります。第三に、追加の機械的調整(ダンパー、スロットル、バルブ、ブレーキなど)は必要なく、すべてが電子的に行われます。このような制御装置を使用すると、最大 50% の節約が可能になります。
複数のデバイスを同期する

高調波に対するネットワーク保護
保護を強化するために、短いシールド ケーブルに加えて、ライン チョークとバイパス コンデンサが使用されます。 スロットルさらに、スイッチオン時の突入電流を制限します。
適切な保護クラスの選択
周波数ドライブのスムーズな動作には、信頼性の高い熱放散が不可欠です。 IP 54 以上などの高い保護クラスが使用されている場合、そのような熱放散を実現するのは困難であるか、コストがかかります。したがって、高度な保護を備えた別個のキャビネットを使用し、下位クラスのモジュールを取り付けて一般的な換気と冷却を実行することができます。
電気モーターを 1 つの周波数変換器に並列接続
コストを削減するために、1 つの周波数変換器を使用して複数の電気モーターを制御できます。その出力は、すべての電気モーターの総出力の 10 ~ 15% の余裕をもって選択する必要があります。その際、モーターケーブルの長さを最小限に抑える必要があり、モーターチョークを取り付けることが強く望まれます。
ほとんどの周波数変換器では、周波数ドライブの動作中にモーターをオフにしたり、コンタクターを介して接続したりすることはできません。これは、デバイス上の stop コマンドによってのみ実行されます。
制御機能の設定
 力率、効率、過負荷容量、調整の滑らかさ、耐久性など、電気ドライブの最大の性能を達成するには、動作周波数の変化と周波数の出力電圧の比率を正しく選択する必要があります。コンバータ。
力率、効率、過負荷容量、調整の滑らかさ、耐久性など、電気ドライブの最大の性能を達成するには、動作周波数の変化と周波数の出力電圧の比率を正しく選択する必要があります。コンバータ。
電圧変化関数は負荷のトルク特性に依存します。一定のトルクでは、モーターのステーター電圧は周波数に比例して制御する必要があります (スカラー制御 U / F = const)。たとえば、ファンの場合、別の比率は U / F * F = const です。周波数を 2 倍にすると、電圧は 4 倍になります (ベクトル制御)。より複雑な制御機能を備えたデバイスもあります。
周波数コンバーターを備えた可変速ドライブを使用する利点
このような電気駆動により、効率の向上とエネルギーの節約に加えて、新たな運転特性を得ることができます。これは、損失を生み出し、システムの信頼性を低下させる追加の機械装置(ブレーキ、ショックアブソーバー、スロットル、バルブ、制御バルブなど)の拒否に反映されています。たとえば、ブレーキはモーターのステーター内の電磁場を反転させることで実行できます。周波数と電圧の関数関係のみを変更することで、機構を何も変更することなく、異なる駆動が得られます。
ドキュメントを読む
周波数変換器は互いに似ており、一方を習得すればもう一方を扱うのは簡単ですが、ドキュメントを注意深く読む必要があることに注意してください。一部のメーカーは製品の使用に制限を設けており、これらに違反した場合は製品を保証の対象外とします。
あなたは次のことに興味があるかもしれません: エネルギー節約手段としての可変電気駆動装置