周波数変換器の動作原理とユーザーの選択基準
 非同期電動機の制御装置として周波数変換器を選択する目的、動作原理、基準について簡単に説明します。
非同期電動機の制御装置として周波数変換器を選択する目的、動作原理、基準について簡単に説明します。
かご形誘導電動機 今日、それはさまざまな機械や機構を制御するための最も大規模で信頼性の高いデバイスです。しかし、どのメダルにも裏返しがあります。
誘導モーターの 2 つの主な欠点は、単純なモーターが不可能であることです。 ローター速度制御、非常に大きな始動電流 - 公称値の 5、7 倍。機械的な制御装置のみを使用する場合、これらの欠点により、大きなエネルギー損失と衝撃的な機械的負荷が発生します。これは機器の耐用年数に非常に悪影響を及ぼします。
周波数変換器

周波数変換器 パルス幅制御 (PWM 付き PE) を使用すると、突入電流が 4 ~ 5 分の 1 に減少します。誘導モーターのスムーズな始動を実現し、指定された電圧/周波数比に従ってドライブを制御します。
周波数コンバータにより、最大 50% のエネルギー節約が実現します。隣接するデバイス間のフィードバックを可能にすることが可能になります。タスクに合わせて装置を自動調整し、システム全体の動作条件を変更します。
周波数変換器の動作原理
PWM周波数コンバータは、 ダブルコンバージョンインバータ... まず、主電源電圧 220 または 380 V が入力ダイオード ブリッジによって整流され、次にコンデンサを使用して平滑化およびフィルタリングされます。
これが変革の第 1 段階です。第 2 段階では、定電圧から、制御マイクロ回路と出力ブリッジを使用します。 IGBTスイッチ、特定の周波数とデューティサイクルを持つ PWM シーケンスが形成されます。周波数変換器の出力では、方形パルスのパケットが発行されますが、誘導電動機の固定子巻線のインダクタンスにより、それらは統合され、最終的には正弦波に近い電圧になります。
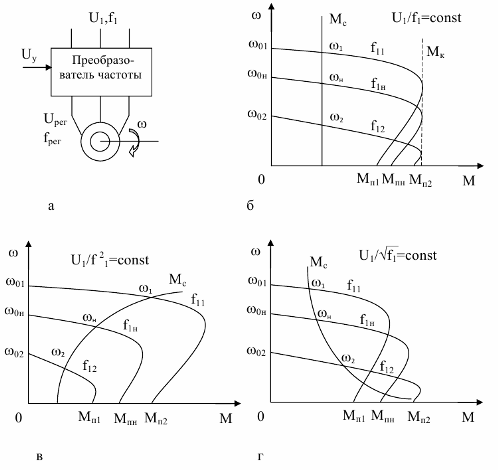 速度を周波数制御する非同期電気モーターの機械的特性: a - 接続図; b — 一定の静的抵抗モーメントを持つ負荷の特性。 c — ファン負荷特性。 d — 静的負荷トルク特性。回転角速度に反比例します。
速度を周波数制御する非同期電気モーターの機械的特性: a - 接続図; b — 一定の静的抵抗モーメントを持つ負荷の特性。 c — ファン負荷特性。 d — 静的負荷トルク特性。回転角速度に反比例します。
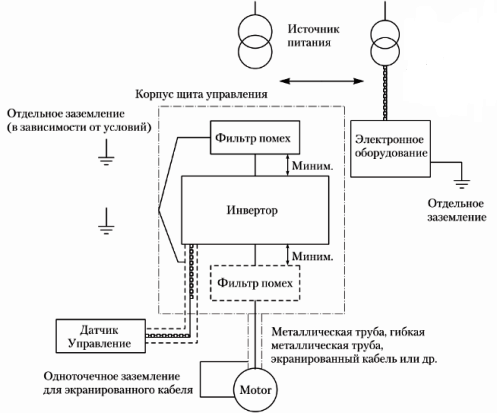 周波数変換器をオンにするための一般的な回路
周波数変換器をオンにするための一般的な回路 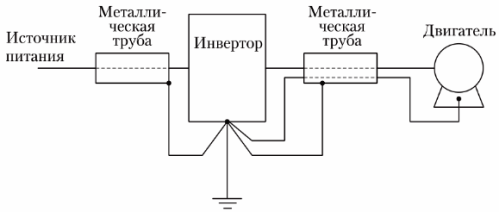 周波数変換回路における電力線(ケーブル)の接続例
周波数変換回路における電力線(ケーブル)の接続例
周波数変換器の選択基準

制御方法によって
電力、性能タイプ、過負荷容量などの点で不適切なコンバータは直ちに廃棄してください。管理の種類に応じて、何を選択するかを決定する必要があります。 スカラーまたはベクトル制御.
最新の周波数コンバータのほとんどはベクトル制御を実装していますが、そのような周波数コンバータはスカラー周波数コンバータよりも高価です。
ベクトル制御により静的誤差が低減され、より正確な制御が可能になります。スカラー モードは、出力電圧と出力周波数の間の一定の比率のみをサポートしますが、たとえばファンの場合、これで十分です。
ベクトル制御は、その誕生以来、誘導電動機の制御方式として非常によく使われるようになりました。現在、ほとんどの周波数変換器はベクトル制御、さらにはセンサーレスベクトル制御を実装しています(この傾向は、もともとスカラー制御を実装しており、速度センサーを接続するための端子を持たない周波数変換器に見られます)。
ベクトル制御の基本原理は、モーターの磁化電流と直交電流を個別に独立して調整することで構成されており、シャフトの機械的トルクはそれに比例します。磁化電流はロータのゼロ鎖交磁束の値を決定し、一定に保たれます。
速度が安定すると、希望のモーター速度と測定されたモーター速度の差を入力とする別の PI コントローラーを使用して直角位相電流設定値が生成されます。したがって、設定速度を維持するのに十分な機械的トルクを提供するために、直交電流は常に最小レベルに設定されます。したがって、ベクトル制御はエネルギー効率が高い。
力を通して
機器の電力がほぼ同じ場合は、最大負荷の電力に応じた容量を持つ同じ会社のコンバータを選択してください。これにより、互換性が確保され、機器のメンテナンスが簡素化されます。選択した周波数変換器のサービス センターがあなたの都市にあることをお勧めします。
主電源電圧経由
常に、ダウンとアップの両方で可能な限り広い電圧範囲を持つコンバータを選択してください。実際のところ、ローカル ネットワークにとって、標準という言葉そのものが笑いをもたらすだけであるということです。電圧が低いために周波数変換器が停止する可能性が高い場合、電圧が上昇すると主電源の電解コンデンサが爆発し、デバイスの入力に障害が発生する可能性があります。
周波数調整範囲別

制御入力数による
制御コマンド(始動、停止、逆転、停止など)を入力するにはディスクリート入力が必要です。フィードバック信号(動作中のドライブの設定と設定)にはアナログ入力が必要です。デジタル入力は、デジタル速度および位置センサーからの高周波信号を入力するために必要です (エンコーダ)。入力の数が多すぎることはありませんが、入力が増えるほど、システムの構築がより複雑になり、コストも高くなります。
出力信号数による
ディスクリート出力は、さまざまなイベント (アラーム、過熱、入力電圧の上下、エラー信号など) の信号を出力するために使用されます。アナログ出力は、複雑なフィードバック システムを構築するために使用されます。選択に関する推奨事項は前の段落と同様です。
制御バス
周波数コンバータを制御する機器は、選択した周波数コンバータと同じバスと入力/出力の数を備えている必要があります。将来のアップグレードに備えて、入力と出力用のスペースを残しておきます。
保証期間中
保証期間により、周波数変換器の信頼性を間接的に評価できます。当然のことながら、長期計画を持って周波数変換器を選択する必要があります。一部のメーカーでは、保証の対象外となる損傷の場合について特別に規定しています。常にドキュメントを注意深く読み、機器のモデルやメーカーのレビューをオンラインで検索してください。これは正しい選択をするのに役立ちます。質の高いサービスとスタッフのトレーニングにはお金を惜しまないでください。
 スタンド上の周波数変換器
スタンド上の周波数変換器
過負荷容量
最初の概算として、周波数コンバータの出力はモーター出力より 10 ~ 15% 大きく選択する必要があります。コンバータの電流は、モータの定格電流より大きく、過負荷が発生する可能性のある電流よりわずかに大きくなければなりません。
特定のメカニズムの説明では、通常、過負荷電流とその継続時間が示されます。ドキュメントを読んでください!これにより、楽しみを続けることができ、将来の機器の損傷を防ぐことができます。ドライブが衝撃 (ピーク) 負荷 (2 ~ 3 秒間の負荷) を特徴とする場合は、ピーク電流に対応したコンバータを選択する必要があります。再度10%のマージンを取ります。
このトピックについては、以下も参照してください。 VLT AQUA ポンプユニット用駆動周波数コンバータ