エンコーダ — 回転角度センサー
 さまざまなタイプの産業機器の位置決めは、シンプルな外観のデバイスであるエンコーダ (言い換えれば角度センサー) を使用して行われます。
さまざまなタイプの産業機器の位置決めは、シンプルな外観のデバイスであるエンコーダ (言い換えれば角度センサー) を使用して行われます。
エンコーダは、直線運動または回転運動をバイナリデジタル信号に変換するために使用されます。エンコーダは、そのシャフトが調査対象の物体の回転シャフトに接続されており、物体の回転角度を電子的に制御する装置です。動作原理によれば、エンコーダは光学式と磁気式に分けられます。
光学式エンコーダのシャフトには、周囲に断続的な窓を備えたディスクがあり、その周囲に LED とフォトトランジスタがあり、次の形式の出力信号を確実に形成します。 方形パルス列 周波数はウィンドウの数とディスク/シャフトの回転速度の両方に比例します。パルス数は回転角度を示します。
光学式エンコーダは、インクリメンタル エンコーダとアブソリュート エンコーダとして利用できます。
インクリメンタル エンコーダには、ベース半径と同じサイズの多数のウィンドウと 2 つの読み取り値を備えた断続ディスクが備わっています。 フォトカプラ、シャフトの回転角度と回転方向の両方を固定できます。ディスクの余分な半径には、開始位置 (ホーム) を定義する 1 つのブレーク ウィンドウと対応するフォトカプラがあります。
負のトルク - インクリメンタル エンコーダは回転角度の相対的な読み取り値を提供しますが、その情報は回転が停止すると保存されません。それらの利点には、高解像度および高動作周波数での設計の簡素化 (したがって低コスト) が含まれます。
耐久性が向上したインクリメンタル エンコーダは、機械工学、圧延機、造船、繊維、履物、木工などの産業用途に重点を置いています。このようなエンコーダにとって、決定的なパラメータは、回転角度の分解能、高周波数で動作する能力、過酷な環境の条件に耐えるための高度な保護です。
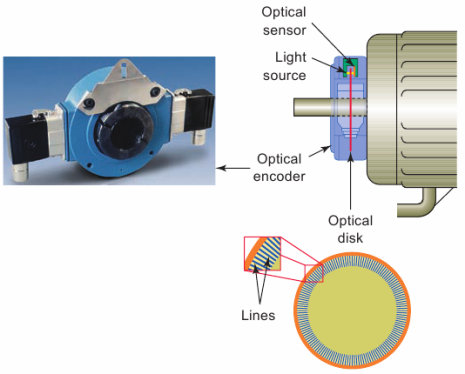
光学センサーへの光ビームを遮断する線または切り込みのあるディスク。電子回路がビームの遮断を感知し、エンコーダからデジタル出力パルスを生成します。
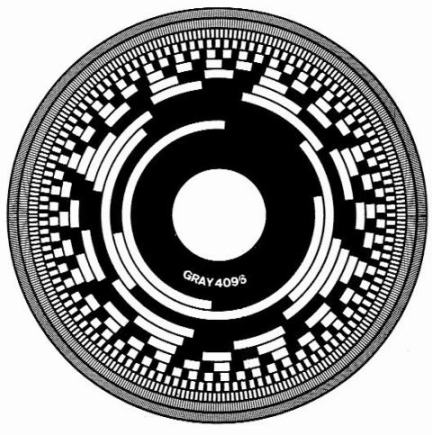
エンコーディング ディスク — シャフトの角変位をデジタル形式に変換するデバイス。デジタル コードの幾何学的イメージがエンコード ディスクに適用されます。コード ビット シンボルは同心円状のトラック上に適用され、最下位 (重要度の低い) ビットは周縁近くに配置されます。
コードの読み取り方法(接触式、光電式、電磁式、誘導式、静電式など)に応じて、コードの幾何学的イメージは、導電性と電気絶縁性、透明性と不透明性、磁性体と非磁性体などで構成されます。
最も普及しているのは、さまざまなバイナリ コードを含むエンコード ディスクで、個別の個別セクションの境界を越えるとき、境界の片側で一部のビットを読み取ることができ、もう一方の側では一部のビットを読み取ることができる (不正確なインストールが原因で) エラーの発生を排除します。リムーバブル デバイスの影響、またはディスクの回転中の非同時読み取りコードによるもの。これらのコードには、いわゆるファウ コード (バーカー コード) およびリフレックス コード (グレイ コード) が含まれます。
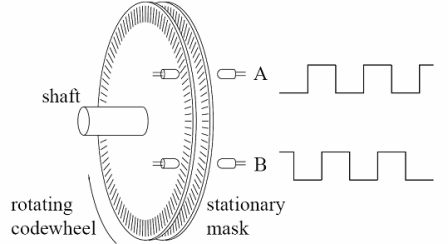
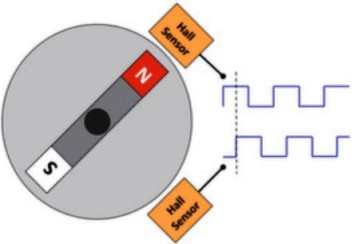
光学式ロータリーエンコーダの中には、反射型エンコーダディスクを使用するものもあります。このディスクには光を吸収または反射するセクションが交互にあり、光源と受光器がディスクの片面に配置されています。光源と受信機が 1 つだけの場合、センサーからの一連のパルスにより、ディスクが以前の位置に対して何ステップ回転したかを知ることができます。
センサーは回転方向を知ることはできませんが、最初のペアとは 90 度位相がずれた 2 番目のソースとレシーバーのペアを追加すると、マイクロコントローラーは、ソースとレシーバーの間の位相差によってディスクの回転方向を判断できるようになります。パルス列。
ディスクの相対回転は検出するが、その絶対的な角度位置を測定できないシステムはすべてインクリメンタル エンコーダであることに注意してください。
アブソリュート エンコーダには、異なる半径の同心円状のウィンドウを備えた不連続ディスクがあり、その相対的なサイズはバイナリ コードによって決定され、同時に読み取られて、各角度位置のコード化された出力信号 (グレイ コード、バイナリ コードなど) が得られます。
この場合、出力には電気ノイズから保護されたコード化されたワード「n ビット」が含まれるため、デジタルカウンターを使用せずにシャフトの瞬間位置に関するデータを取得したり、初期位置に戻すことが可能です。
絶対値エンコーダは、入力データを長期間保存する必要があるアプリケーションで使用されますが、設計がより複雑で高価です。
フィールドバス インターフェイスを備えたアブソリュート エンコーダには、CANopen、ProfiBus、DeviceNet、Ethernet、InterBus 標準に準拠したフィールドバス通信用の出力インターフェイスがあり、バイナリ コードを使用して回転角度を決定します。上記の通信インターフェースは、回転方向、1 回転あたりのパルス分解能、ボーレートなどの多数のパラメータに従ってプログラム可能です。

モーターシャフトに取り付けられたエンコーダーは、正確な位置制御を効果的に提供します。このようなエンコーダは通常、「穴」バージョンで製造されており、特殊なカップリングが設計の重要な要素であり、モーターシャフトのバックラッシュを補正することができます。
上記の条件で位置決めすることで、内部の光チョッパの回転に関係なく、ホール効果によりシャフトの角変位を非接触で電気信号に変換する磁気エンコーダが最も効果的に得られます。センサーに影響を与え、最大 60,000 rpm の速度での信号処理が可能になります。
磁気エンコーダでは、円筒形の永久磁石が固定された外軸の高速回転を、単一の半導体結晶上に信号処理コントローラと組み合わせたホールセンサで検知します。
永久磁石の極が超小型回路上で回転すると、 ホールセンサ 可変磁気誘導ベクトルは、シャフト回転角度の瞬時値に関する情報を含むホール電圧を誘導します。マイクロコントローラーは、ホール電圧を位置決め角度パラメーターに高速変換します。

磁石とホール センサー要素を直接機械的に接続せずにこのような変換が可能であることが磁気エンコーダーの主な利点であり、磁気エンコーダーに高い信頼性と耐久性をもたらし、産業オートメーション、印刷、金属加工に関連する高速アプリケーションで効率的に動作することができます。 、測定および計測機器。