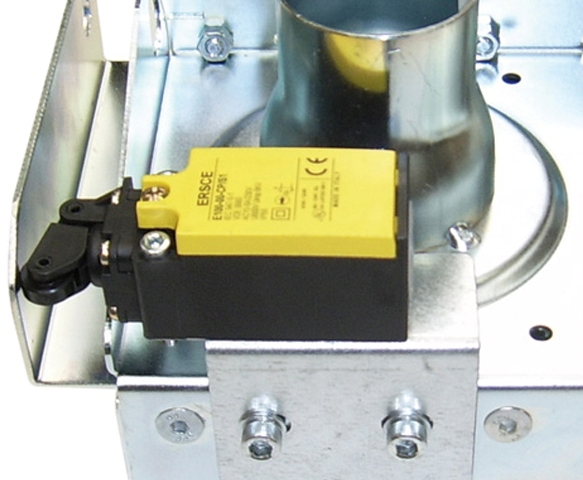
トラベルスイッチの接触式と非接触式の比較
産業オートメーションでは回路が広く使用されています トラベル(ポジション)スイッチとスイッチ さまざまな生産機構の位置を制御するように設計され、これらの機構の動きの変換に基づいて設計された複数の設計 電気信号の中で.
位置スイッチは生産機構の位置制御以外の機能、例えば回転角度、レベル、重り圧力などの制御にも使用できます。

方向スイッチは、増加の原理に基づいて動作する個別の動作を持つデバイスです。つまり、制御される機構の位置の変化にのみ反応します。ウェイスイッチの出力信号は、特定の初期位置からの機構の動きのあいまいな関数です。
道路スイッチの種類
位置切り替えの原理に応じて、切り替え方法は次のように細分されます。
-
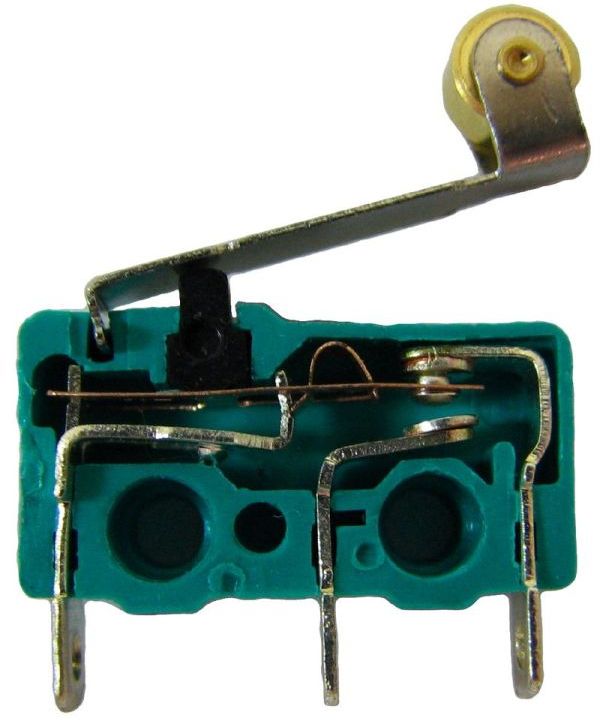
スイッチング接点と接触に敏感な要素で作られた機械的接点。
-
静的接触(磁気機械式)。その感応要素は非接触であり、スイッチング要素は接触である。
-
非接触を構成する静的非接触、高感度、スイッチング要素。
「スイッチング - ストップ」ノードの接触特性、つまり、駆動要素(入力制御信号)と感応要素との接続の接触特性において、このノードは機械式と呼ばれ、非接触 - 静的ノードと呼ばれます。 。
設計に応じて、スイッチを組み合わせたり分離したりできます。最初のケースでは、感応要素とスイッチング要素が 1 つのハウジング内に配置され、全体として構造的に実行されます。 2 つ目では、感知要素がスイッチから数十メートルから数百メートルの距離にある可能性があります。
パススイッチの磁場の歪みはパラメータを変更することで実現されます。 磁気回路 敏感な要素。可変パラメータには、活性表面積やエアギャップのサイズなども含まれます。 透磁率 磁気回路。
現在、産業オートメーションにおける機械式接触位置スイッチの応用分野は狭まっており、自動制御システムを構築する目的でこのタイプの位置スイッチが役に立たないのではないかという疑問が生じています。
後者は次のことが原因で発生します。
-
スイッチストップアセンブリの設計は、多くのパラメータの許容変動の制限に関する要件の厳格さにより複雑になり、その製造と調整に大きな困難が生じます。
-
この装置の精度特性は、不安定要因 (接触面の磨耗、留め具の緩み、可動要素の位置ずれなど) の影響に対する重要性が比較的高くなります。
機構の設計ソリューションの多くは、機械式接点スイッチに基づいてはまったく実装できません。これらには、高い許容レベルの速度とモーション スイッチの頻度を必要とするメカニズムが含まれます。
道路スイッチの必要な動作速度が、特に制御システムの品質特性(特に精度パラメータ)を低下させる機構の追加の運動リンクによって低下する可能性がある場合、許容動作周波数(解像度)は構造上の複雑さによって向上しない可能性があります。
以下も参照してください。 リミットスイッチおよびスイッチの設置
この場合、位置切り替えの機械的接触原理が広く使用されている理由は何でしょうか?この質問に対する答えは、自動制御システムの構築に関する既存の原理と、接触経路スイッチ回路の利点という 2 つの側面から探る必要があります。
接点パススイッチのメリット
機械式接点スイッチは、通常、複数回路出力を備えて実装されており、次の利点によって特徴付けられます。
-
高いスイッチング比。
-
高い比制御力(全体の寸法に対する含まれる電力の比率)。
-
汎用性、つまり直流回路と交流回路の両方を切り替える能力。
-
広範囲の電圧が含まれています。
-
内部エネルギー消費は無視できます(閉状態での接点の過渡抵抗の値が小さい)。
-
制御電力の変化に対する動作の精度と安定性の依存性が低い。
接触パススイッチの欠点
これらのデバイスの機械的接触の原理により、多くの場合、自動化システムの信頼性、耐久性、精度に対する増大する要件を満たすことができません。さらに、機械式接点スイッチは、さまざまな気候要因 (特に低温) の影響を非常に受けやすくなります。
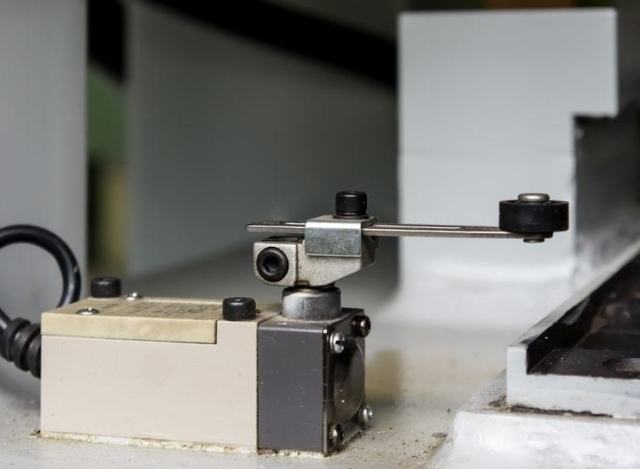
機械式接点スイッチは、開閉停止の最大および最小移動速度の許容レベルが 0.3 ~ 30 m/min の範囲に制限されているという特徴があり、許容レベルを超えて開閉停止の速度を上げると、速度が急激に低下します。スイッチの機械的耐久性が低下します。
このようなスイッチでは、レバーの軸に対するスイッチ力の作用方向の許容偏差は非常に小さく、それを超えると、特に前部プルロッドを備えたスイッチでは機械的損傷につながります。
リレーの出力特性(制御特性)を得るために、このようなスイッチの設計にはトリガースプリング装置が設けられています。必要なレベルのリレー出力特性は、作動時にトリガーに発生する大きな動的応力によりスイッチの耐久性が大幅に低下するという代償を払って達成されます。
機械式瞬間接点スイッチでは、出力特性のヒステリシスループ(ストローク差)の幅がかなりの値に達しますが、これは処理サイクルの持続時間が非生産的に増加するため、多くの技術プロセスではまったく受け入れられません。
これらのディレイラーの移動量の差を減らすことは、設計の複雑さの増加またはサイズの増加に関係します。さらに、場合によっては、機械式接触スイッチを作動させるためにかなりの機械力が必要となります。
近接スイッチのメリットとデメリット
上記の状況により、前述の欠点がなく、同時に同様の機能を実行できるデバイスを開発する必要性が生じています。このようなデバイスは、 近接スイッチ、その利点は次のとおりです。
-
高い信頼性と高い許容動作周波数による優れた耐久性。
-
作動時に機械的な力が必要なく、振動や加速度などに対する感度が低い。
-
比較的広範囲の外部条件の変化に対するパラメータの感度はあまり重要ではありません。
-
運用サービスの条件を改善します。
近接スイッチのフィードバックレベルが低いため、精度特性の長期にわたる高い安定性を維持しながら、ストップスイッチ構造の大幅な簡素化が達成されます。さらに、電気的および機械的接点がないため、これらのデバイスの火災および爆発の安全性が確保され、適用可能な領域が大幅に拡大します。
非接触リミット スイッチの重大な欠点の 1 つは、機械式接触リミット スイッチでは簡単に実装できる多くの設計変更の実装が複雑であることです。
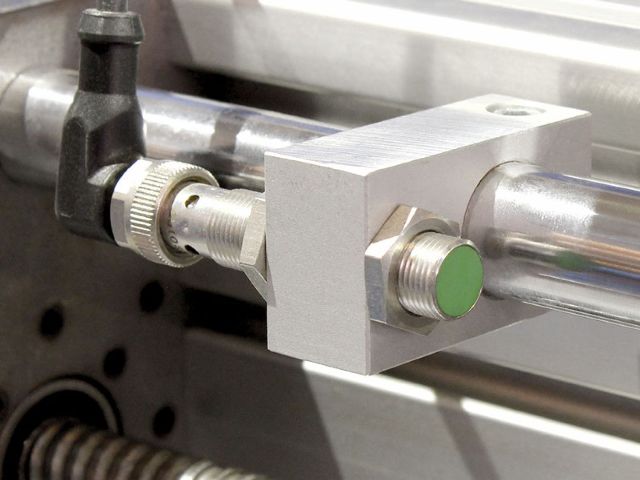
近接スイッチ装置
パラメトリックタイプの静的非接触パススイッチの動作原理は、駆動要素がその領域に現れたときに感応要素によって生成される磁界または電界の歪みの使用に基づいており、その結果として不平衡状態が発生します。スイッチの電気回路で発生し、出力デバイスがトリガーされます。
静的近接スイッチは、ほとんどの場合単一の出力回路で作られており、一部のスイッチでは作動に出力での信号の出現 (直接スイッチング効果) が伴い、他のスイッチでは消失 (逆スイッチング効果) が伴いますが、これは同等です。それぞれ機械的接触経路の閉接点と開接点に接続されます。
リレーモード近接スイッチ回路に増幅素子がある場合、感知素子の出力パラメータは制御された動作に継続的に機能的に依存する可能性があります。
現在、非接触トラベルスイッチの多数の設計変更が使用されており、感度のレベル(作動ギャップのサイズ)、取り付け面に対するスロットまたは感応要素の面の位置、スイッチの方向が異なります。リード線、検出素子のステップ数(スロットのある設計の場合)、スロットの深さ、接続ワイヤの長さ、電源電圧のレベル、環境の影響に対する保護の性質など。
非接触モーションスイッチの使用可能性は、その電気的および機械的特性のパラメータによって決まります。
電気パラメータには次のものが含まれます。
- 出力信号の性質と出力回路の数。
- 消費電力と出力電力。
- 出力信号の形状。抵抗と電圧のスイッチング係数 (変圧器タイプのスイッチの場合)。
- タイミング特性(トリガー時間とリリース時間)と発射周波数(分解能)。
- 供給電圧のレベルと形状、およびその偏差の許容限界。
機械的性能パラメータには次のものが含まれます。
- 感度(作動ギャップのサイズ)、
- 寸法と接続寸法。
- 精度特性(主要誤差および追加誤差)およびストローク差。
- 設置特性(スイッチングブレーキの種類と設置方法、フィードバックのレベル、スイッチの取り付けと設置方法)。
- ノイズ保護レベル。
近接スイッチ デバイスとスイッチの詳細については、ここを参照してください。 機構の位置を検出する非接触センサー
イベンスキー ユウ N.産業オートメーションにおける非接触トラベルスイッチ