非同期モーターの周波数調整
現在、非同期モーターを使用した電気駆動装置の回転角速度の周波数制御が広く使用されています。これにより、ローターの回転速度を公称値の上下両方で滑らかに変化させることができるためです。
周波数コンバータは、非同期モーターを制御するための広範な機能セットを備えた、幅広い調整範囲を備えた最新のハイテクデバイスです。最高の品質と信頼性により、ポンプ、ファン、コンベアなどの駆動制御としてさまざまな産業でご利用いただけます。

供給電圧用の周波数変換器は単相と三相に分かれていますが、設計により回転電気機械と静止電気機械に分けられます。電気機械コンバータでは、従来の電気機械または特殊な電気機械を使用して可変周波数が得られます。 V 静的周波数変換器 供給電流の周波数の変化は、動きのない電気要素を使用することによって実現されます。
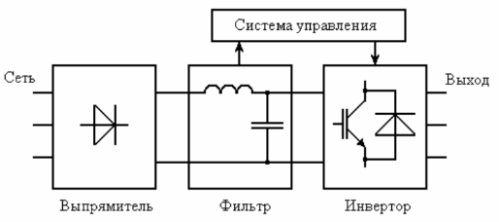
誘導電動機の周波数変換回路
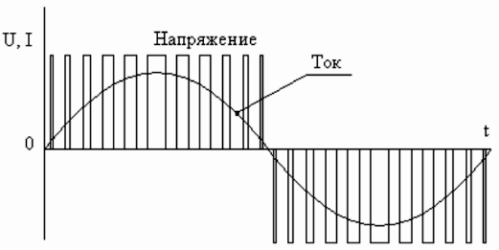
周波数変換器の出力信号
単相主電源用の周波数コンバータは、最大 7.5 kW の電力で生産装置に電気駆動を提供できます。最新の単相コンバータの設計の特徴は、入力に電圧 220V の 1 相があり、出力に同じ電圧値の 3 相があることです。これにより、三相電気モーターを電気モーターに接続できます。コンデンサを使用しないデバイス。
380V 三相ネットワークで駆動される周波数コンバータは、0.75 ~ 630 kW の電力範囲で使用できます。電力値に応じて、デバイスはポリマー結合ケースと金属ケースで製造されます。
誘導電動機の最も一般的な制御方式はベクトル制御です。現在、ほとんどの周波数変換器はベクトル制御、さらにはセンサーレスベクトル制御を実装しています(この傾向は、もともとスカラー制御を実装しており、速度センサーを接続するための端子を持たない周波数変換器に見られます)。
出力負荷のタイプに応じて、周波数コンバータは実装のタイプに応じてさらに分割されます。
-
ポンプおよびファン駆動用。
-
一般産業用電気推進用。
-
過負荷で動作する電気モーターの一部として機能します。

代表的な負荷の機械的特性
最新の周波数変換器は、さまざまな機能特性を備えています。たとえば、モーターの速度と回転方向を手動および自動で制御できます。 内蔵ポテンショメータ コントロールパネル上で。出力周波数範囲を0~800 Hzの範囲で調整できる機能を備えています。
コンバータは、周辺センサーからの信号に従って非同期モーターを自動的に制御し、指定されたタイミング アルゴリズムに従って電気ドライブを駆動することができます。短期間の停電時の自動復旧機能をサポートします。リモートコンソールから過渡制御を実行し、電動モーターを過負荷から保護します。

回転角速度と供給電流の周波数の関係は式から得られます。
ωo = 2πe1/p
供給電圧 U1 が一定で周波数が変化すると、誘導モーターの磁束が変化します。同時に、磁気システムをより効果的に使用するには、電源周波数の低下に応じて電圧を比例的に下げる必要があります。そうしないと、鋼の磁化電流と損失が大幅に増加します。
同様に、供給周波数が増加すると、磁束を一定に保つために電圧も比例して増加する必要があります。そうしないと(シャフトトルクが一定の場合)ロータ電流が増加し、電流によって巻線に過負荷がかかり、最大トルクが減少します。
合理的な電圧調整の法則は、抵抗モーメントの性質に依存します。
静的負荷の一定の瞬間 (Ms = const) では、電圧はその周波数 U1 / f1 = const に比例して調整する必要があります。ファン負荷の性質上、比率は U1 / f21 = const の形式になります。
負荷トルクは速度に反比例します。 U1 /√f1 = const.
以下の図は、角速度を周波数制御する誘導電動機の簡略接続図と機械的特性を示しています。
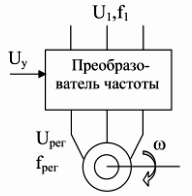
周波数変換器と非同期モーターの接続図
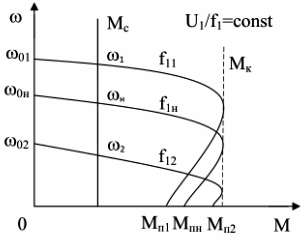
静的抵抗モーメントが一定の負荷の特性
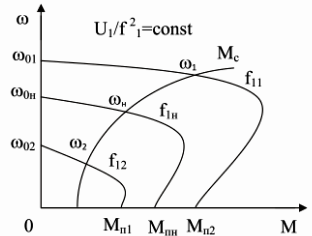
NSファンの充電機能
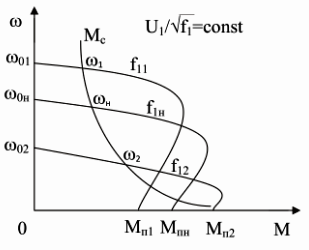
静負荷時の特性 トルクが回転角速度に反比例する
非同期モーターの速度の周波数調整により、回転角速度を 20 ~ 30 ~ 1 の範囲で変更できます。非同期モーターの速度の調整は、メイン速度から実質的にゼロまで実行されます。
電源ネットワークの周波数が変化すると、非同期モーターの回転速度の上限はその機械的特性に依存します。特に、公称周波数を超える周波数では、非同期モーターは低い周波数よりも優れたエネルギー特性で動作するためです。したがって、駆動システムにギアボックスが使用されている場合、モーターのこの周波数制御は、公称点から下げるだけでなく、機械的強度の条件下で許容される最大回転速度まで実行する必要があります。ローター。
エンジン速度がパスポートに示されている値を超えて増加する場合、電源の周波数は公称周波数の 1.5 ~ 2 倍を超えてはなりません。
かご型回転子誘導電動機の制御には周波数法が最も有望です。このような規制による電力損失は、電力の増加を伴わないため、小さくなります。 滑る…得られる機械的特性は非常に剛性です。