連続運転時のエンジン出力の決定
 電気モーターの温度が定常値に達するような持続時間の電気駆動装置の動作モードは、長期と呼ばれます。この場合、電気モーターの公称電力は、機械を動作させるために必要な電力と等しくなければなりません。この公称出力の電気モーターがカタログにない場合は、最も近い高出力のモーターが選択されます。
電気モーターの温度が定常値に達するような持続時間の電気駆動装置の動作モードは、長期と呼ばれます。この場合、電気モーターの公称電力は、機械を動作させるために必要な電力と等しくなければなりません。この公称出力の電気モーターがカタログにない場合は、最も近い高出力のモーターが選択されます。
特定の技術プロセスについて、切削力 F (N) と切削速度 v (m/min) がわかっている場合、切削力 (kW) は次の式で決定できます。

駆動用電気モーターの対応するシャフト出力を決定するには、機械の機械伝達における損失を考慮する必要があり、そのためには機械の効率 ηc を知る必要があります。それから:

エンジン始動時の動力損失は(平均して)公称負荷時の損失を超えますが、考慮されている状況では、始動プロセスが繰り返されることは非常にまれであるため、これらの損失は無視できます。
ユニバーサル(ユニバーサル)マシンの駆動力を決定する場合、それらはat以来、連続動作モードを持つマシンとみなされます。これらのマシンの操作は、そのようなモードでも可能です。この場合、電動機軸の動力は

ここで、Prn — 可能な最高の (公称) 切削能力。
ηcn — 定格負荷における機械の主運動回路の効率 (通常は 0.8 に近い値)。
全負荷時の機械の効率 ηsn は、特定の速度で動作するときに運動連鎖を形成する個々の歯車の効率の積として定義できます。

各速度は、ギアの数とタイプに応じて、機械の効率の特定の値に対応します。
回転速度が大幅に増加すると、機械の動力損失が大幅に増加します。これは、一部の損失が回転速度よりも速く増加するという事実によるものです (たとえば、ギアボックス内のオイル混合損失など)。
 電源回路を駆動するために必要な電力は通常低いです。メインドライブと電源回路を同時に駆動する場合、モーター電力はメインドライブ回路に必要な電力より約 5% 大きくする必要があります。別個の電源を使用する場合、その電力はメイン駆動回路の場合と同じ方法で決定する必要があります。この場合、エンジンの動力は、ガイドやその他のトランスミッションリンクの摩擦を供給し、克服するために費やされます。
電源回路を駆動するために必要な電力は通常低いです。メインドライブと電源回路を同時に駆動する場合、モーター電力はメインドライブ回路に必要な電力より約 5% 大きくする必要があります。別個の電源を使用する場合、その電力はメイン駆動回路の場合と同じ方法で決定する必要があります。この場合、エンジンの動力は、ガイドやその他のトランスミッションリンクの摩擦を供給し、克服するために費やされます。
サプライチェーンの有効性は、そのチェーンを構成する要素を知ることで判断できます。通常、この効率の値は 0.1 ~ 0.2 の範囲にあります。
最高の負荷条件に基づいて選択されたモーターを備えた汎用マシンには、通常、負荷がかかっています。このような作業を行うと、著しく悪化します エネルギーパフォーマンスを向上させる... 可能な最大負荷と比較して電気モーターの公称出力が低下すると、機械の使用可能性が制限されます。これは容認できないことを考慮して、工作機械工場は、機械が動作できる最高出力に合わせて選択された原動機電気モーターが取り付けられた汎用機械を製造します。
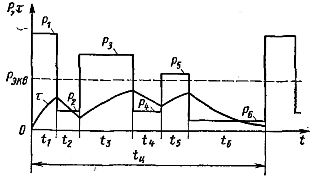
米。 1. 変動負荷連続運転スケジュール
長期間の変動負荷の下では、電気ドライブの動作は、図に示したものと同様の負荷スケジュールによって特徴付けられます。 1.金属切断機械部品の各加工遷移は、特定のモーター軸出力に対応します。切削期間は、工具の供給と後退、およびワークピースの交換を行う機械のアイドル間隔によって区切られます。
すべての補助演算を含む 1 つの部分を処理する合計時間は、サイクル タイム tts と呼ばれます。同じ種類の部品を加工し、メインドライブチェーンに摩擦クラッチを備えた機械や、多くの電気モーターが連続回転する自動ライン機械も同様です。
可変負荷で動作する場合は、スケジュールに従って最高出力で動作できるようにモータを選択する必要があります (過負荷の選択)。これにより、特定の負荷スケジュールで動作するときにモータが通常を超えて過熱しないようにする必要があります (過負荷の選択)。暖房)。これらの条件により決定される 2 つの公称容量のうち、大きい方が選択されます。
過負荷容量

ここで、Pn1 は過負荷条件下で必要なエンジンの定格出力です。 Pmax — 平衡状態でのエンジンの動作に対応する負荷スケジュールの最大出力。 λ1 — 許容過負荷の係数。