エンジン回転数制御装置
非同期電気モーターは、逆流ブレーキ回路で広く使用されています。誘導速度制御リレー... 円筒形の永久磁石 4 が取り付けられたリレー 5 の入力軸は、角速度を制御される電動機のシャフトに接続されます。
電気モータが回転すると、磁界が回転ステータ6の短絡回路3のワイヤを横切る。EMFが巻線に誘導され、その値はシャフトの回転角速度に比例する。その影響下で、コイルに電流が発生し、磁石の回転方向にステータ6を回転させようとする相互作用力が生じる。
特定の回転速度になると力が非常に大きくなり、リミッター 2 が板バネの抵抗に打ち勝ってリレー接点を切り替えます。リレーには 1 と 7 の 2 つの接点が装備されており、回転方向に応じて切り替わります。
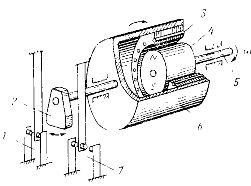
図 1. 誘導式速度制御リレー
誘導速度制御リレーはかなり複雑な設計であり、精度が低いため、粗い制御システムでのみ許容されます。タコジェネレータ(測定用マイクロマシン)を使用すると、より高い速度調整精度を達成できます。タコジェネレータの端子電圧は回転速度に直接比例します。
タコジェネレータは、広い回転数範囲の可変速ドライブフィードバックシステムで使用されるため、誤差はわずか数パーセントです。最も一般的なのは DC タコジェネレーターです。
図では。図2は、タコジェネレータGを使用する電気モータM用の速度制御リレーの図を示す。その電機子回路は、電磁リレーKおよび調整レオスタットRを含む。タコジェネレータの電機子端子の電圧が動作電圧を超えると、外部回路でリレーがオンになります。
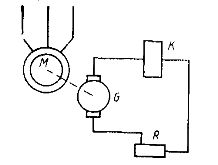
図2. タコジェネレータ付き速度制御リレー
 図 3. タコメータブリッジの概略図
図 3. タコメータブリッジの概略図
電機子回路の抵抗が増加すると、回路の精度が増加します。したがって、リレーは中間の半導体アンプを介してタコジェネレータに接続される場合があります。この目的には、応答電圧が安定した半導体非接触しきい値素子を使用することも可能です。
DC タコジェネレータを非接触非同期タコジェネレータに置き換えると、回路の信頼性が向上します。
非同期タコジェネレーターには、ガラス製の中空の非磁性ローターが付いています。ステータには、互いに 90 ° の角度で巻かれた 2 つの巻線があります。コイルの 1 つは交流ネットワークに接続されています。正弦波電圧がもう一方の巻線から除去され、これはローターの速度に比例します。出力電圧の周波数は常に主電源の周波数と等しくなります。
 最新の DC Executive モーターでは、タコジェネレーターが機械と同じハウジングに組み込まれ、メイン モーターと同じシャフトに取り付けられています。これにより、出力電圧リップルが低減され、速度調整の精度が向上します。
最新の DC Executive モーターでは、タコジェネレーターが機械と同じハウジングに組み込まれ、メイン モーターと同じシャフトに取り付けられています。これにより、出力電圧リップルが低減され、速度調整の精度が向上します。
電磁励起を備えた PT-1 タイプ DC タコジェネレーターは、PBST シリーズ電気モーターで一般的に使用されます。高トルク DCモーター 永久磁石励磁タコを内蔵しています。
DC モーター M にタコジェネレーターがない場合、その速度は電機子起電力を測定することによって制御できます。このために、タコメトリック ブリッジ回路が使用されます。この回路は、2 つの抵抗器 R1 と R2、電機子 Ri、および機械の追加の極 Rdp によって形成されます。タコメータブリッジの出力電圧 Uout = U1 — Udp、または
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
最後の等式は、電動機の磁束が一定であるという条件下で成り立ちます。タコメトリックブリッジの出力にしきい値要素を含めることで、特定の角速度に設定されたリレーが得られます。タコメータブリッジの精度は、ブラシの接触抵抗のばらつきや抵抗の加熱アンバランスにより低くなります。
DC モーターが人為的な特性で動作し、アーマチュアに大きな追加抵抗が含まれている場合、アーマチュア端子に接続された電圧リレーによって速度リレー機能を実行できます。
電気モーターの電機子の電圧 Uja = E + IjaRja。
I = (U — E) / (Ri + Rext) なので、Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U が得られ、第 2 項は無視できます。そして、電機子端子電圧は、起電力とモーターの回転速度に直接比例すると考えることができます。
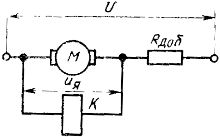
図4. 電圧リレーによる速度制御
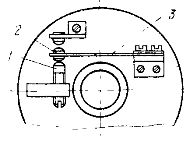 図 5. 遠心速度制御リレー
図 5. 遠心速度制御リレー
とてもシンプルなデザインです。遠心速度スイッチ... リレーの基礎はシャフトに取り付けられたプラスチック製のフェースプレート 4 であり、その回転速度を制御する必要があります。前面プレートには、弾性率が温度変化にほとんど影響を受けない特殊鋼製の板バネ 3 と、巨大な可動接点 2 と固定調整接点 1 を備えた板バネ 3 が固定されています。
面板が回転すると可動接点に遠心力が働き、一定の回転速度で板バネの抵抗に打ち勝って接点が切り替わります。電流は、図には示されていないスリップ リングとブラシを介して接点デバイスに供給されます。このようなリレーは、DC マイクロモーターの速度安定化システムに使用されます。シンプルであるにもかかわらず、システムは 2% 程度の誤差で速度を維持します。
