機構の動きをピストン制御
リレー回路
 図では。図1は、SQコントローラによって固定された定ストロークピストン運動制御方式のさまざまな変形例を示す。
図では。図1は、SQコントローラによって固定された定ストロークピストン運動制御方式のさまざまな変形例を示す。
図の図。図1において、a〜cは、サイクルが開始位置への1回の「前進」動作Bと1回の「後退」動作Hで構成される場合に使用される。スキーム 1、a、b は、KQ リレーによって与えられる自動コマンドで使用されます。 KT リレーは、後進を開始する前に一時停止を提供します。図の図では、図1に示すように、サイクル開始コマンドはコントローラまたはユニバーサルスイッチSMによって与えられる。
無限往復運動を実現するには、図の図を使用します。 1、d. ストローク数を所定の値 n で制限する必要がある場合、「バック」コンタクタ KM2 の閉接点によって供給されるパルスをカウントする、カウント リレーまたは複数のリレーのユニットの開接点は次のようになります。コンタクタ回路«フォワード»KM1に含まれています。
4 つの位置でストローク長を可変して往復運動を実行する例を図に示します。 2.コマンドデバイス SQ の接点 SQ.1-SQ.4- は、「前進」ストロークの位置 1 ~ 4 で機構を交互にオフにするために使用され、初期位置では接点 SQ.5- が使用されます。この回路は、ワーク送り時などに閉じるオートメーションリレー KQ1 と、各ストロークの終わりで中間動作の終了を固定する KQ2 によって与えられるパルス指令を使用します。
SQ コントローラの順次操作 SQ.1 ~ SQ.3 は、「バック」機構 KS1、KSZ、KS5 の移動回数をカウントするリレーの接点によって実行されます。リレー KS7 は 4 番目の動き「後退」を固定し、リレー KS1-KC6 をオフにし、このブランクのグループ (リレー KR) による技術的操作の終わりに青が到着するまで次の「前進」のスイッチを禁止します。 KC7コイル回路のKRリレーの接点が開くと回路が元の状態に戻ります。
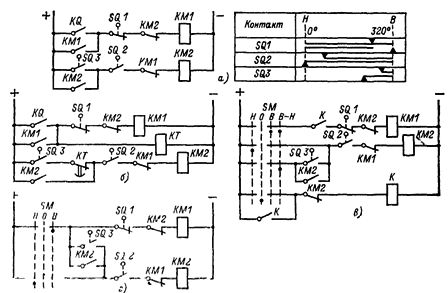
米。 1. 往復運動用リレー制御回路
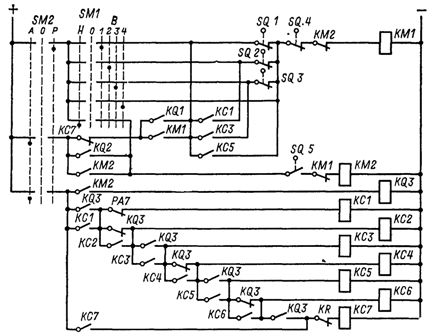
図2. 可変ストローク長レシプロリレーの制御方式
論理回路
«Logic T»シリーズの要素で作られたピストン運動制御回路を図に示します。 3. T-201 タイプの要素 D1 ~ D3 は、入力リレー信号を論理要素と調整するために使用されます。
要素 D4.1、D4.2 のメモリは、リレー KQ がパルスでオンになったときに「前進」するコマンドの存在を固定します。アンプ D5 を介して、フロントコンタクタ KM1 がオンになります。 「前進」機構の動作の終わりに、コントローラSQ1の接点が閉じると、対応する要素D2の出力に信号1が現れ、メモリD4とコンタクタKM1がオフになり、オンになります。要素上のメモリ D6。この場合、「戻る」というコマンドが与えられ、記憶されます。このコマンドは削除され、コントローラ SQ2 の接点が初期位置で閉じると、信号 1 が対応する要素 D3 の出力に現れ、メモリ D6 が無効化され、後退動作が停止します。
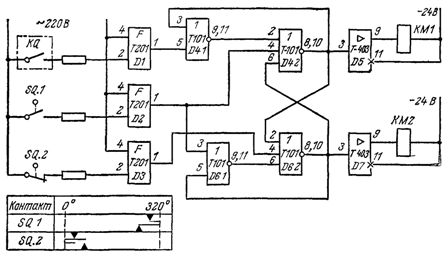
米。 3. «Logic T»シリーズの要素の往復運動を制御するためのスキーム
メモリ D4 と D6 はブロックされているため、どちらか 1 つだけをオンにできます。メモリ D4 がオンの場合、要素 D4.2 の出力からの信号 1 が要素 D6.2 の入力 2 に供給され、メモリ D6 が無効になり、その逆も同様です。メモリ D6 がオンになると、要素 D6 2 の出力からの信号 1 が要素 D4.2 の入力 6 に供給され、メモリ D4 が無効になります。