自動遮断および信号回路
 マルチモータードライブでは、通常、個々の電気モーターの制御回路間のインターロック接続によって、さまざまなモーターのオン、オフ、反転、調整、停止の定義されたシーケンスが提供されます。
マルチモータードライブでは、通常、個々の電気モーターの制御回路間のインターロック接続によって、さまざまなモーターのオン、オフ、反転、調整、停止の定義されたシーケンスが提供されます。
ここでは、2 つのかご型ローター モーターの制御に使用される自動ロック方式をいくつか紹介します。
図の図によると。図1のaに示すように、一方のモータが始動すると、他方のモータがオンになる可能性は排除される。これは、他方のモータの接触器が作動すると開く補助接点K1およびK2によって提供される。同じ回路を使用して、ブロックすることなく各モーターを個別に遠隔制御できます。これを行うには、補助接点 K1 および K2 をバイパスして、接点 1 および 2 の両方のペアが閉じているときに、2 位置スイッチ SM を正しい位置に設定する必要があります。
図の図によると。図1のbに示すように、スタートボタンSB1を押すことにより、第1エンジン(図示せず)が始動する。それに伴い、2台目のエンジンも自動的に始動します。ただし、最初のエンジンが作動していない場合、2 番目のエンジンは始動できません。一方のエンジンをオンにすると、もう一方のエンジンが即座に停止します。自動運転時は SM スイッチを左位置にして 1 接点と 3 接点を閉じ、個別制御では SM スイッチを右位置にして接点 2 と 4 を閉じます。
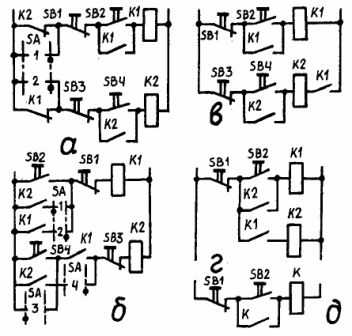
イチジク。 1. 2 つの非同期モーターのブロック方式: a — ブロック例外。 b および c — 依存ブロッキング。ドライバー — 2 つのエンジンが連携して動作するとき
図の図によると。 1 では、モーターが 1 つずつオンになります。最初に SB1 ボタンで最初のモーターがオンになり、次に SB2 ボタンで 2 番目のモーターがオンになります。最初のエンジンは個別に動作することができますが、2 番目のエンジンは最初のエンジンとのみ連携して動作できます。モーターを一緒に動作させるだけの場合、始動制御スキームは大幅に簡素化されます。
図の図によると。図1、dでは、これは2つの接触器と共通のスタートボタンによって提供されます。 1、d — 一般的なコンタクタから。上記のすべてのスキームでは、対応する SB ボタンを使用してモーターを停止します。
エンジン制御スキームがどれほど合理的に構成されているとしても、その個々の要素の動作における誤動作の可能性を考慮する必要があります。動作の信頼性は、機器の品質や設置だけでなく、制御回路の構成にも依存するため、回路の動作モードに応じてさまざまな種類の警報を提供し、緊急モードを回避する必要があります。電圧が回復した後、回路を再接続せずに作業を自発的に継続することを排除するために、オペレータは情報信号を提供します(図2)。図のバージョンの単純さにもかかわらず、2、ああ、ランプが切れたときに誤警報を発する可能性があります。
より信頼性の高いオプションは図です。 2、b、2 つのランプのうちの 1 つが切れても、誤った情報を提供しないためです。回路に自由接点がある場合、図の変形が行われます。 2、ある方がより信頼性が高くなります。 KV 電圧リレーが存在する場合の電圧回復信号は、図のスキームに従って与えることができます。 2、d. 電圧が除去された後、トリガーボタン SB によって再起動が実行されます。リレーまたはコンタクタのコイルの開回路は誤動作の原因となるべきではないため、コイル回路が開いているときに閉じる常開接点は制御回路に含めるべきではありません。
図の回路では、図2では、重要なユニットの巻線の電流を監視する宇宙船監視リレーが使用されており、これは接触器Kのコイルと並列に接続されている。コイルKの開信号はランプHLによって示される。電圧が除去されたときにコンタクタ K のアーマチュアが固着すると、ランプ HL1 の点灯によってコンタクタがオンのままであるという信号が提供されます。
可聴警報回路の 1 つの変形を図に示します。 2、e. このスキームは、4 つのエンジンの正しい動作を監視するために使用されます。 4 つのエンジンすべてが始動すると、この回路の警報は自動的に作動する準備が整います。この場合、第4モータK4の閉接点が音声信号KV作成用のリレーをオンし、区間a~bの開接点が開く。この場合、KV リレーのセルフロック接点とブロッキング接点が閉じます。
たとえば、セクション ab のモーターの 1 つに過負荷が発生した場合、開いている接点の 1 つが閉じ、HA アラームがただちに鳴ります。ブザーを解除するには、HA と直列に接続されている SB ボタンを押します。これにより、KV リレーとその KV 接点の回路が開きます。 SB1ボタンを押すとモーターが自動停止し、KHオートストップリレーが作動します。
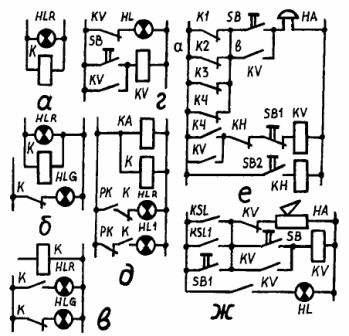
米。 2. シグナリング方式: a、b、c — 情報シグナリングの例。 d および d — 電圧および制御リレー付き。 f、g — 緊急事態
開いた接点 KH リレーは、コンタクタ K1、K2、K3、K4 (コンタクタは図には示されていません) のコイルへの供給回路をオフにし、もう一方の KN 接点で KV リレーをオフにし、HA ブザーをオフにします。ビープ音を確認するには、SB ボタンを押します。
チップボード製造ホッパーのおがくずの上下レベルを制御するには、図に示すように可聴アラームを使用できます。 2、g。切りくずがホッパーの上部レベルに達すると、リレー KSL がオンになり、その閉接点がブザー HA をオンにします。ホッパー内の切りくずが設定レベルを下回ると、RSL1 低レベルリレー接点が閉じ、ブザーが鳴ります。
SBボタンを押すとビープ音は消えます。 SB ボタンはリレーをオンにして KV 信号を除去し、その接点が開くと HA 信号がオフになります。 KV リレーは、制御電圧が除去されるまで、自己ラッチ接点を介して通電されたままになります。ボタンSB1を押すと音声アラームの動作が確認されます。
図では。図3は、2つのプロセスパラメータの電気信号伝達の図を示す。
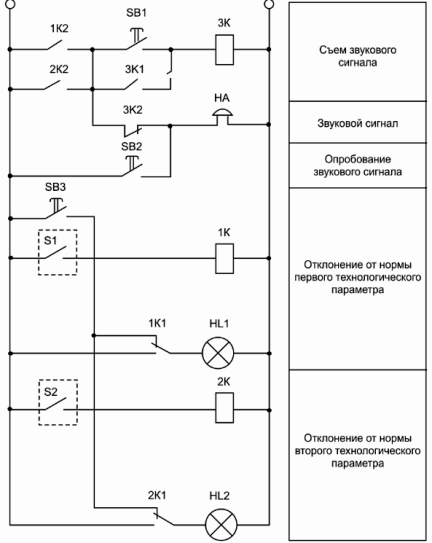
米。 3. 警報回路
そのうちの 1 つ、たとえば最初の標準から逸脱した場合、対応する測定装置または信号装置にあるプロセス接点 S1 が閉じます。これにはリレー 1K が含まれており、スイッチング接点 1K1 により信号ランプ HL1 をオンにし、警報テスト ボタン SB3 によって信号ランプ HL1 をオフにします。
同時に、断線したリレー3Kの開接点3K2を介してリレー1Kの閉接点1K2がベルをオンする。ベルは可聴アラーム解除ボタン SB1 によって作動し、押すと 3X7 接点を介して 3K リレーが自動ラッチされ、ベルは開いた接点から切断されます。
この回路状態で第2プロセス接点S2が閉じると、ブザーを外すと信号灯HL2のみが点灯し、ブザーは鳴らなくなります。プロセス接点 S1 と S2 の両方を開いた後、回路は元の状態に戻り、すべてのリレーが非通電になります。ボタン SB2 と SB3 は、ベルと信号灯をテストするためのものです。