複数の場所からの電気駆動制御スキーム
 連続プロセスラインでは、ドライブが主に一方向(順方向)に動作し、逆転はまれであるため、ブレーカーを介した「順方向」動作用のラインコンタクタを組み込んだ回路(図1)を使用することをお勧めします。 「逆」動作の場合 - KMR コンタクタの作動接点を介して。この構成により、希望の方向に駆動を開始する時間が短縮されます。
連続プロセスラインでは、ドライブが主に一方向(順方向)に動作し、逆転はまれであるため、ブレーカーを介した「順方向」動作用のラインコンタクタを組み込んだ回路(図1)を使用することをお勧めします。 「逆」動作の場合 - KMR コンタクタの作動接点を介して。この構成により、希望の方向に駆動を開始する時間が短縮されます。
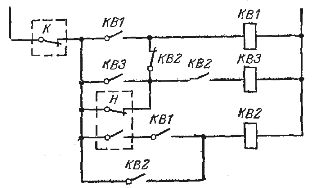
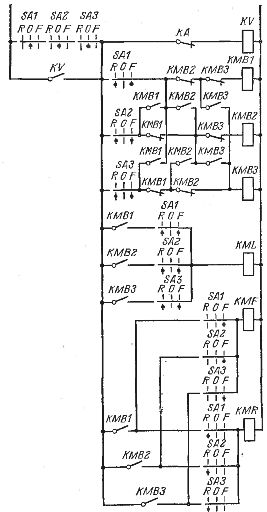
図の図。 2 により、移動物体から電気モーターを遠隔可逆制御できます。この回路は、たとえば、クレーンから加熱ウェル カバーのモーターを制御するために使用されます。信号回路と各種信号の受信を図に示します。 3 - 9。
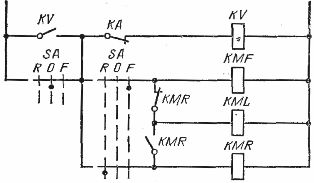
米。 1.珍しいリア「リア」を備えたリアエンジン制御方式。
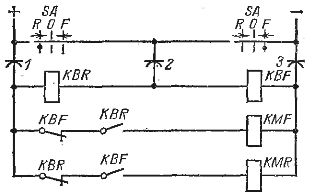
米。 2. 制御トロールによるモーターの可逆制御のスキーム。
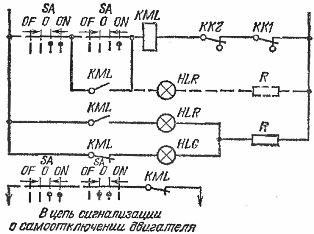
米。 3. 不可逆電気ドライブのステータスを通知するためのスキーム。
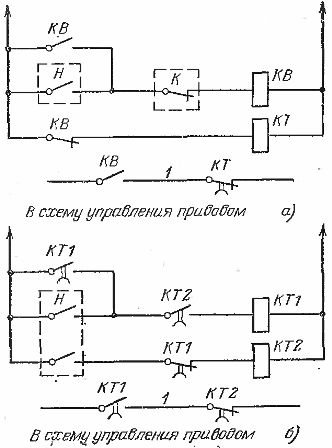
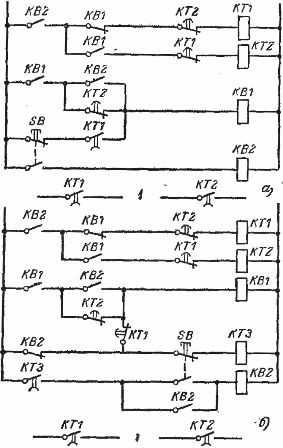
米。 4.長い信号 (a) およびパルス信号 (b) への曝露開始後に時間遅延して信号を受信する回路: K - ロック解除接点、1 - ドライブの制御回路への接点。
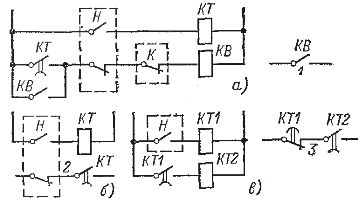
米。 5. 信号 H のビートの終了後 (末尾から) 信号を受信するスキーム (a)、パルス (b)、時間遅延のあるパルス (c)。 K — ロック解除接点、1、2、3 — 駆動制御回路への接点。
米。 6. セカンダリH開始後にロング信号を受信する方式。
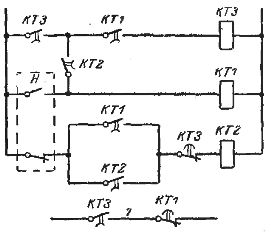
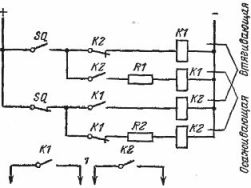
米。 7. 信号 H の 2 次動作後に時間遅れでパルス信号を受信する方式 (KT1 は 0.2 ~ 0.8 s、KT2 は 0.3 s、KTZ は 0.5 s)。 1 — 駆動制御回路への接点。
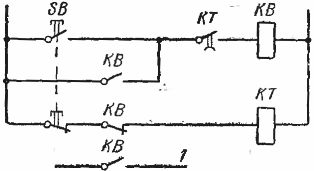
米。 8. ボタンを押している時間に関係なく、特定の時間の信号を受信するためのスキーム: 1 - 駆動制御回路に接続します。
カウントスキームは、特定の操作またはサイクル数をカウントした後にドライブに自動的に影響を与えるために使用されます。クロージャと開口部 (図 10)、クロージャのみ (図 11)、または開口部のみ (図 12) をカウントできます。
示されたスキームに従ったカウントパルスは、フォトリレー接点、モーションスイッチ、またはその他のデバイスから供給されます。
図に示すカウントスキームでは、図 10 に示すように、REV850 リレーはアーマチュアの磁気「固着」を伴って使用されるため、この回路への電圧供給が中断されてもカウントは妨げられません。他の計数回路では、電圧供給が遮断されると、パルスカウントが失われます。
アカウントスキームの有効性を確認するには (図 11)、 コントロールボタン… SB0N ボタンを押すたびに、回路は 1 カウントを実行します。 SB0Fボタンはカウンターをリセットするために使用します。このようなボタンは他の方式でも提供できます。
米。 9. 1 つのボタンを連続して押すことによって 2 つの異なる回路で信号を受信する回路: a — 信号の持続時間はボタンを押している持続時間に等しい、b — 信号の持続時間はボタンを押している持続時間に依存しない、1 — 駆動制御回路への接点。
米。 10. アカウントのスキームは 2 つまでです。
各番号のパルスは、リミット スイッチ SQ の接点の 1 回の開閉です。 1 — 駆動制御回路への接点。
図の回路でパルスをカウントします。 11、12 は SQ 接点の短期間の閉路 (開路) であり、この接点の閉路状態はインパルス接触器 KNA と 1 つのリレー KB (KL) をオンにするのに十分なはずです。
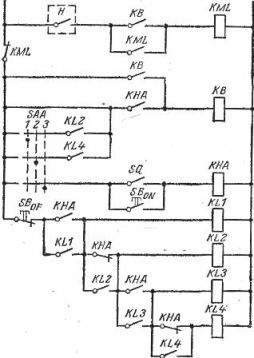
米。 11. SQ 接点が閉じたときに 3 までカウントする仕組み。
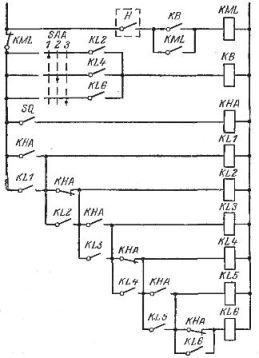
米。 12. SQ接点オープン時に3までカウントする仕組み
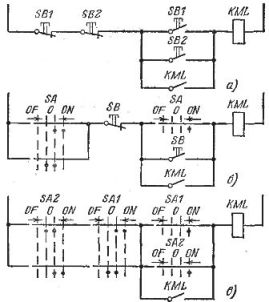
ご飯13. 2 つの場所からエンジンを不可逆的に制御するスキーム: a - 2 つのボタン、b - ボタンとキー、c - 2 つのキー。
米。 14. 2 つの場所からの電気駆動装置の片側従属可逆制御のスキーム。
カウントは KML ラインコンタクタによってリセットされます。 SQ コンタクタの閉時間は、KML コンタクタのオン時間よりも短くなければなりません。
わずかに大きな数の計数スキームは上記のスキームと同様に作成できますが、カウントが 5 または 8 を超える場合、または電圧がなくなったときに計数が失われることが許容できない場合は、番号付きの計数スキームを使用することをお勧めします。リレー。
米。 15. 依存可逆エンジン制御のスキーム: a — 2 か所から、b — 3 か所から
最大 30 カウントのタイプ E-526 モーター ステップ カウント リレー、または最大 75 パルス カウントのタイプ E 531 パルス カウント リレーを使用できます。リレーは交流で動作し、その接点によりそれぞれ AC 220 V で電源オフが可能になります。 DC 50 ワットと 30 ワット。
複数の場所からの電気モーターの制御回路は、依存することも、一方向に依存することも、独立することもできます (図 13)。ほとんどの場合、最も単純な依存制御スキームが使用されます (図 15)。これらの方式によれば、いずれかの制御装置を操作するときに、別の装置のハンドルをゼロから操作位置まで動かすと、モーターが停止する。
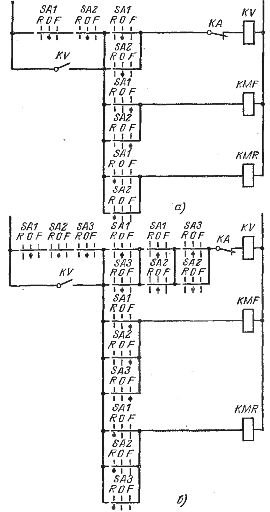
2箇所(図14)および3箇所(図16)からの一方向依存制御方式により、スイッチSA1はスイッチSA2(SA2、SA3)の位置とは独立して制御できる。 SA2 スイッチの制御は、SA1 スイッチがゼロの位置にあるときに可能であり、SA3 スイッチの位置には依存しません。 SA1 および SA2 スイッチがゼロの位置にある場合、SA3 スイッチの制御が可能です。
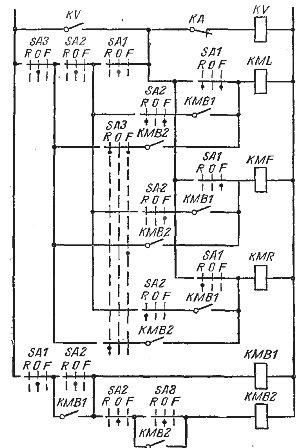
図 16. 3 箇所レシプロモーターの一方向依存制御の概略図
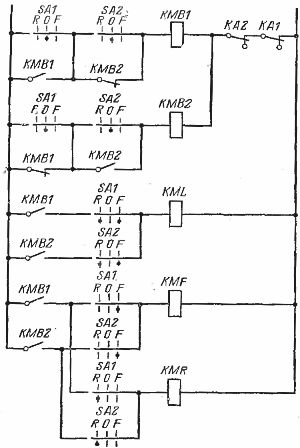
米。 17. 2 か所からのエンジンの独立した可逆制御のスキーム。
米。 18. 3 か所からのエンジンの独立した可逆制御のスキーム。
独立した制御方式 (図 17 および 18) では、ドライブが最初のスイッチ (SA1、SA2、または SA3) によって制御されている場合、他のスイッチのハンドルを動かしてもドライブの動作には影響しません。最初のキーのハンドルのゼロ位置に戻った後、アクチュエーターは 2 番目のキー (または他の 2 つのキー) のハンドルの位置に関係なく停止します。 2 番目のキー (または他の 2 つ) をゼロの位置に戻した後でのみ、新たな開始が可能です。
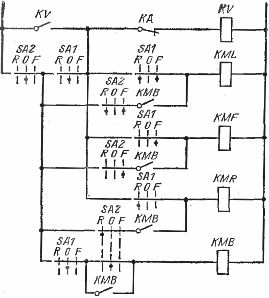
非常に多くの場合、簡略化されたスキームに従って 2 か所または 3 か所からの駆動制御が使用されます (図 19)。これは、1 つの最初の場所 (キー SA1) のみからの優先制御を意味します。ドライブが別のスイッチ (SA2 または SA3) によって制御されている場合、最初のスイッチのハンドルをゼロ位置から動かすと、制御がそのスイッチに転送されます。
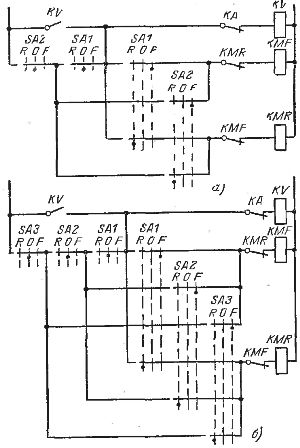
米。 19. 可逆電気駆動装置を制御するための簡略化されたスキーム: a — 2 か所から、b — 3 か所から。