DCモーターの起動・停止自動制御回路
 エンジンの始動には、電源回路と制御回路内の特定のスイッチが伴います。この場合、リレーコンタクタと非接触装置が使用されます。 DCモーターの制限用 始動電流 始動抵抗はモーターのローターとアーマチュア回路に組み込まれており、モーターが段階的に加速するとスイッチがオフになります。起動が完了すると、起動抵抗は完全にバイパスされます。
エンジンの始動には、電源回路と制御回路内の特定のスイッチが伴います。この場合、リレーコンタクタと非接触装置が使用されます。 DCモーターの制限用 始動電流 始動抵抗はモーターのローターとアーマチュア回路に組み込まれており、モーターが段階的に加速するとスイッチがオフになります。起動が完了すると、起動抵抗は完全にバイパスされます。
モーターのブレーキプロセスも自動化できます。停止コマンドの後、リレー接触装置の助けを借りて、電源回路で必要なスイッチが作成されます。速度がゼロに近づくと、モーターはネットワークから切断されます。起動中、ステップは一定の間隔で、または他のパラメータに応じてオフになります。これにより、モーターの電流と速度が変化します。
モーターの始動制御は、EMF (または速度)、電流、時間、経路の関数として実行されます。
始動 DC モーターの自動制御のための典型的なサブアセンブリと回路
並列励磁または独立励磁による DC モーターの始動は、電機子回路に導入された抵抗によって行われます。突入電流を制限するには抵抗が必要です。モーターが加速すると、始動抵抗器が段階的に変化します。始動が完了すると、抵抗は完全にバイパスされ、モーターは本来の機械特性に戻ります (図 1)。始動時、エンジンは人為的な特性 1、次に 2 に従って加速し、抵抗器を操作した後は自然な特性 3 に従って加速します。
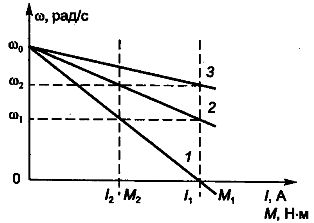
米。 1. 並列励磁による DC モーターの機械的および電気機械的特性 (ω - 回転角速度、I1 M1 - モーターのピーク電流とトルク、I2 M2 - 電流とスイッチング モーメント)
EMF 関数の DC モーター (DCM) の始動回路ノードを考えてみましょう (図 2)。
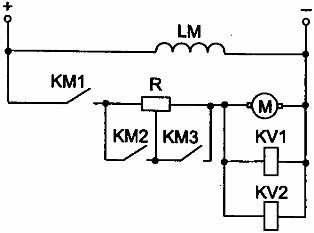
米。 2.EMF機能における並列励磁のDCTの起動回路ノード
EMF (または速度) 機能は、リレー、電圧、および接触器によって制御されます。電圧リレーは、さまざまな電機子起電力値で動作するように構成されています。コンタクタ KM1 が ON になると、始動時の KV リレーの電圧が不足して動作します。モーターが加速すると (モーター起電力の増加により)、KV1 リレーが作動し、次に KV2 が作動します (リレー作動電圧は対応する値を持ちます)。これらには加速コンタクタ KM2、KMZ が含まれており、電機子回路内の抵抗は分路されています (コンタクタのスイッチング回路は図には示されていません。LM は励磁巻線です)。
EMF 機能で DC モーターを起動するスキームを見てみましょう (図 3)。モーターの角速度は多くの場合、間接的に固定されます。速度に関連する量を測定します。 DC モーターの場合、このような値は EMF です。起動は以下のように行う。 QF サーキットブレーカーがオンになり、モーターフィールドが電源に接続されます。 KA リレーが作動し、接点が閉じます。
回路の残りのデバイスは元の位置に残ります。エンジンを始動するには、次のことを行う必要があります ボタンを押す SB1 «Start»。その後、コンタクタ KM1 が作動し、モータを電源に接続します。コンタクタ KM1 は自己電源式で、DC モータはモータ電機子回路抵抗 R によって加速されます。
モーターの速度が増加すると、その起電力とリレー KV1 および KV2 のコイルの電圧が増加します。速度 ω1 (図 1 を参照) では、リレー KV1 が作動します。接触器回路 KM2 の接点が閉じ、始動抵抗器の初段がトリップしてその接点で短絡されます。速度 ω2 では、リレー KV2 が通電されます。その接点により、KMZ コンタクタの電源回路が閉じられ、接点により作動すると、始動抵抗器の 2 番目の始動段が短絡されます。エンジンは本来の機械的特性に達し、離陸を終了します。
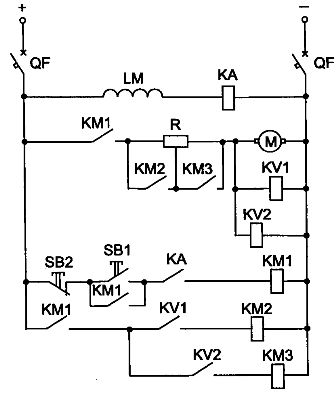
米。 3. EMF機能における並列励磁のDCT開始の概略図
回路が正しく動作するには、電圧リレー KV1 が速度 ω1 に対応する EMF で動作するように設定し、リレー KV2 が速度 ω2 で動作するように設定する必要があります。
エンジンを停止するには、停止ボタン SB2 を押します。電気回路を切断するには、QF サーキットブレーカーを開きます。
電流機能は電流リレーによって制御されます。磁束関数の DC モータースターター回路ノードを考えてみましょう。図に示す図では、図4では、突入電流I1で検出し、最小電流I2でドロップアウトする過電流リレーが使用されています(図1を参照)。電流リレーの内部応答時間は、コンタクタの応答時間よりも短くなければなりません。
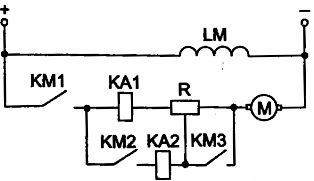
米。 4.電流に応じた並列励磁DCTの起動回路ノード
モーターの加速は、抵抗器が電機子回路に完全に挿入された状態から始まります。エンジンが加速すると、電流が減少し、電流I2でリレーKA1が消え、その接点により接触器KM2の供給回路が閉じられ、その接点により始動抵抗器の最初の接点がバイパスされます。同様に、抵抗器の 2 番目の始動段が短絡します (リレー KA2、コンタクター KMZ)。コンタクタの電源回路は図には示されていません。モーターの始動が完了すると、電機子回路内の抵抗がブリッジされます。
DC モーターを始動する回路を磁束関数として考えてみましょう (図 5)。抵抗ステップの抵抗は、モーターがオンになりステップが分路された瞬間に、電機子回路の電流 I1 とモーメント M1 が許容レベルを超えないように選択されます。
DCモーターの始動 QF サーキットブレーカーをオンにし、«Start» ボタン SB1 を押すことによって実行されます。この場合、コンタクタ KM1 が作動し、接点が閉じます。突入電流 I1 はモーターの電源回路を通過し、その影響で過電流リレー KA1 が作動します。その接点が開き、コンタクタ KM2 に電力が供給されなくなります。
米。 5. 電流に応じた並列励磁 DCT 起動の概略図
電流が最小値 I2 まで低下すると、過電流リレー KA1 が低下して接点が閉じます。コンタクタ KM2 が作動し、そのメイン接点を介して始動抵抗器とリレー KA1 の最初のセクションが分流されます。スイッチングすると、電流は値 I1 まで増加します。
電流が再び I1 の値まで増加すると、コンタクタ KM1 のコイルは接点 KM2 によってバイパスされるため、コンタクタ KM1 はオンになりません。電流 I1 の影響で、リレー KA2 が作動し、接点が開きます。加速の過程で電流が再び I2 の値まで低下すると、リレー KA2 が低下し、コンタクタ KMZ がオンになります。始動が完了すると、エンジンは自然な機械特性で作動します。
回路が正しく機能するには、リレー KA1 および KA2 の応答時間がコンタクタの応答時間より短いことが必要です。モーターを停止するには、«停止»ボタン SB2 を押し、QF サーキットブレーカーをオフにして回路を切断します。
時間制御は、時間リレーと、抵抗段を接点で短絡する対応するコンタクタを使用して行われます。
始動回路ノード DC モーターを時間の関数として考えると (図 6)、開接点 KM1 を介して制御回路に電圧が現れると、時間リレー KT が直ちに作動します。接点 KM1 が開いた後、タイムリレー KT は電源を失い、時間遅れで接点を閉じます。コンタクタ KM2 は、リレーが電力を受け取る時間の遅延に等しい時間間隔の後に接点を閉じ、電機子回路内の抵抗を分流します。
米。 6. 時間の関数としての並列励起の DCT 起動回路ノード
時間の関数で制御する利点には、制御の容易さ、加速および減速プロセスの安定性、中間速度での電気駆動の遅延がないことが含まれます。
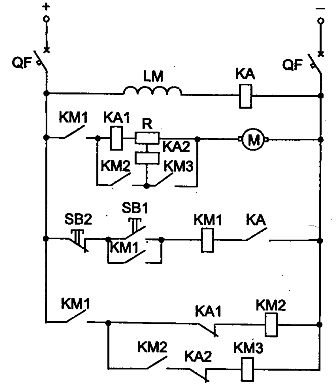
DC モーターの並列励磁を開始する回路を時間の関数として考えてみましょう。図では。図7は、不可逆始動DC並列励磁モータの図を示す。打ち上げは 2 段階で行われます。この回路では、ボタン SB1 «Start» および SB2 «Stop» 、コンタクタ KM1 ... KMZ、電磁時間リレー KT1、KT2 を使用します。 QFブレーカーがONになります。この場合、時間リレーKT1のコイルは電力を受け取り、接触器KM2の回路内の接点を開く。 «スタート»ボタン SB1 を押すとエンジンが始動します。コンタクタ KM1 は電力を受け取り、その主接点により電機子回路内の抵抗を介してモータを電源に接続します。
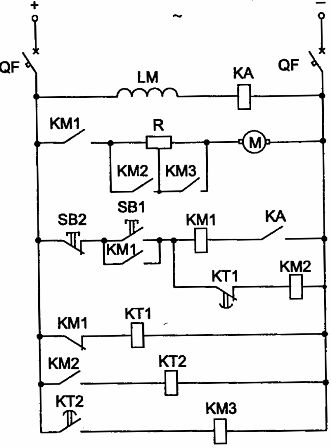
米。 7. 時間の関数としての DC モーターの不可逆始動の概略図
不足電流リレー KA は、励磁回路の遮断からモーターを保護するために機能します。通常動作中、KA リレーが通電し、KM1 コンタクタ回路の接点が閉じて、KM1 コンタクタの動作準備が整います。励磁回路が断線すると、KAリレーがOFFして接点が開き、KM1コンタクタがOFFしてエンジンが停止します。接触器 KM1 が作動すると、その阻止接点が閉じ、リレー回路 KT1 の接点 KM1 が開き、リレー回路 KT1 がオフになり、時間遅れでその接点が閉じます。
リレー KT1 の時間遅延に等しい時間間隔の後、加速接触器 KM2 の電源回路が閉じられ、これがトリガーされ、その主接点によって始動抵抗器の 1 段が短絡されます。同時にタイムリレーKT2が通電されます。エンジンが加速します。 KT2 リレーの遅延に等しい時間間隔の後、KT2 接点が閉じ、KMZ 加速コンタクタが作動し、そのメイン接点が電機子回路の始動抵抗器の第 2 段に接触します。始動が完了し、エンジンは本来の機械特性に戻ります。
代表的なDCブレーキ制御回路ユニット
DC モーター自動制御システムは、ダイナミック ブレーキ、逆ブレーキ、回生ブレーキを使用します。
ダイナミックブレーキでは、モーターの電機子巻線を閉じて追加の抵抗を設け、励磁巻線を通電したままにする必要があります。このブレーキは速度と時間の関数として実行できます。
ダイナミックブレーキ中の速度(EMF)の関数としての制御は、図に示すスキームに従って実行できます。 8. KM1 コンタクタがオフになると、モータの電機子は主電源から切り離されますが、切り離された瞬間にその端子に電圧がかかります。電圧リレー KV が動作してコンタクタ KM2 の回路内の接点を閉じ、その接点によってモータのアーマチュアが抵抗器 R に閉じます。
速度がゼロに近い場合、KV リレーは電力を失います。静的な抵抗モーメントの作用により、最低速度から完全停止までさらに減速します。ブレーキ効率を高めるために、2 段階または 3 段階のブレーキを適用できます。
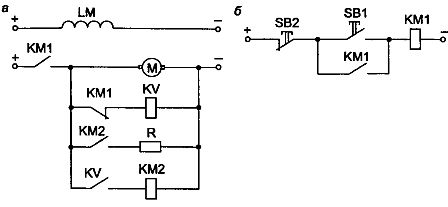
米。 8. EMF機能におけるダイナミックブレーキの自動制御のための回路のノード: a - 電源回路; b — 制御回路
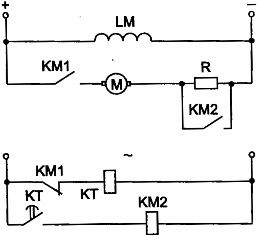
時間の関数としての動的制動一定のモーター独立励起は、図に示すスキームに従って実行されます。九。
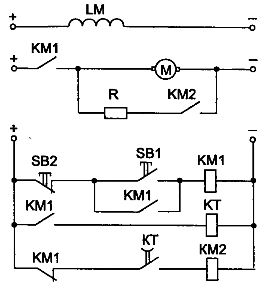
米。 9. 時間の関数としての独立励磁の DCT ダイナミック ブレーキ回路のノード
エンジンが作動しているとき、タイムリレー KT はオンですが、ブレーキ接触器 KM2 の回路は開いています。停止するには、「停止」ボタン SB2 を押す必要があります。コンタクタ KM1 とタイムリレー KT が電源を失います。コンタクタ KM2 の回路内の接点 KM1 が閉じ、タイムリレー KT の接点が時間遅れで開くため、コンタクタ KM2 が作動します。
タイムリレーのタイミングで、コンタクタ KM2 が電力を受け取り、接点を閉じ、モータの電機子を追加の抵抗器 R に接続します。モータの動的停止が実行されます。最後に、KT リレーはしばらくして接点を開き、KM2 コンタクタをネットワークから切断します。完全停止までのさらなるブレーキは、抵抗モーメントMsの影響下で実行されます。
逆動作ブレーキでは、モーターの EMF と主電源電圧がそれに応じて作用します。電流を制限するには、回路に抵抗を挿入します。
DCモーターの励磁制御
モーターの界磁巻線には大きなインダクタンスがあり、モーターのスイッチがすぐにオフになると、界磁巻線に大きな電圧が発生し、巻線の絶縁破壊を引き起こす可能性があります。これを防ぐには、図に示す回路ノードを使用できます。10. 消弧抵抗はダイオードを介して励磁コイルと並列にオンになります (図 10、b)。したがって、スイッチをオフにした後、電流は短時間抵抗を通過します(図10、a)。

米。 10. クエンチング抵抗をオンにするための回路のノード: a — クエンチング抵抗は並列に接続されます。 b — クエンチング抵抗はダイオードを通じてオンになります。
励磁回路の遮断に対する保護は、図1に示すスキームに従って不足電流リレーを使用して実行されます。十一。

米。 11. 励磁回路の遮断に対する保護: a — 電力励磁回路。 b — 制御回路
励磁コイルが破損した場合、リレー KA は通電を遮断し、コンタクタ KM の回路を切断します。