メカトロニクスシステムの空気圧デバイス
モバイル機械、ロボット、さまざまなメカトロニクス システムは、アクチュエーターのおかげで部品を移動したり位置を変更したりする機能を備えています。システムの特定の部分の動きの方向は自由度と呼ばれ、アクチュエータの自由度が大きいほど、機械、ロボット、またはアクチュエータの可動性が大きくなります。
ドライブの種類に応じて、機械部品間の相互作用の多かれ少なかれ定性的な実装、およびその動作の効率と柔軟性が達成されます。アクチュエータの種類の選択は、システム設計段階でロボットエンジニアやロボット技術者によって決定される難しい作業です。
使用される一般的なタイプのドライブの 1 つ メカトロニクスシステムで — 空気圧アクチュエータ… ここではガスが作動媒体(通常は圧縮空気)として使用され、そのエネルギーが機構を駆動します。そのため、空気圧アクチュエータは安価で、信頼性が高く、セットアップと操作が簡単で、火災にも安全です。作動流体(空気)の購入・廃棄費用がかかりません。
しかし、配管の気密性が低いために漏れが発生し、作動圧力が低下する可能性があり、出力や速度が低下したり、位置決めが複雑になったりするなどのデメリットもあります。それにもかかわらず、空気圧モーター、空気圧シリンダー、および空気圧モーターは、今日ロボットや移動機械に広く使用されています。
代表的なデバイスを見てみましょう 空気圧ドライブ… 空気圧駆動には必ずコンプレッサーとエアモーターが含まれます。この組み合わせでは、システムは負荷要件に応じてドライブの機械的特性を変換できます。
並進運動の空気圧アクチュエータは、作動体の移動が 2 つの端位置間で実行される場合は 2 ポジションであり、また、移動が異なる位置で実行される場合はマルチポジションです。
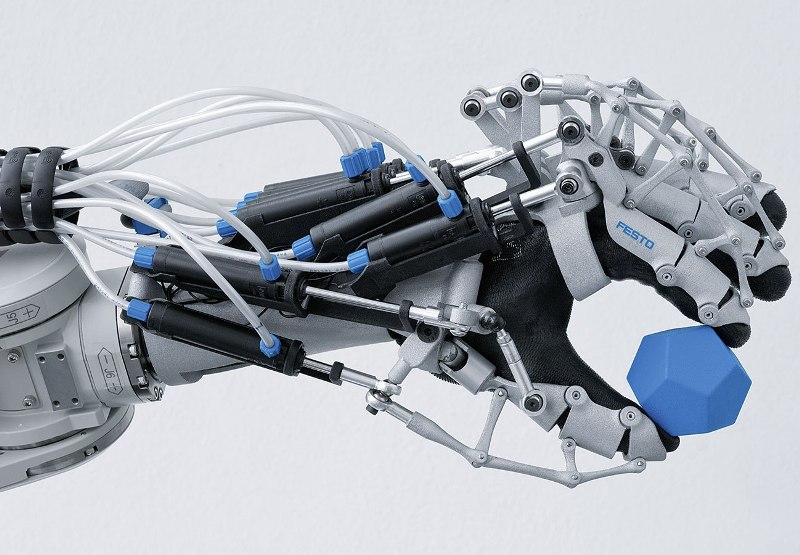
動作原理によれば、空気圧アクチュエータは単動式 (バネが開始位置に戻る場合) または複動式 (動作動作と同様に圧縮空気によって生成される) のいずれかになります。空気圧リニアアクチュエータは主にピストンとダイヤフラムの 2 種類に分かれます。
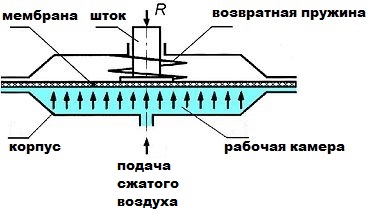
空気圧ピストン アクチュエータでは、ピストンは圧縮空気またはスプリングの作用を受けてシリンダ内を移動します (単動アクチュエータの戻りストロークはスプリングによって提供されます)。空気圧式ダイヤフラムアクチュエータは、ダイヤフラムで2つに区切られたチャンバの一方で圧縮空気がダイヤフラムを押し、もう一方でダイヤフラムに取り付けられたロッドがダイヤフラムから長手方向の力を受けます。したがって、空気圧アクチュエータは、ステムが水平に動くマニピュレータなどの周期制御システムでうまく使用されます。
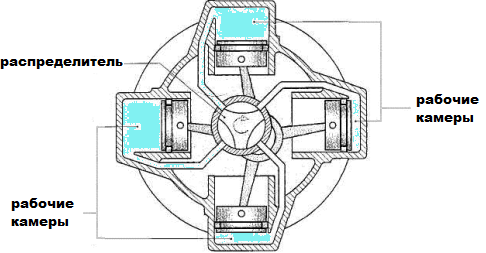
機能的には、空気圧アクチュエータは、空気準備ユニット、圧縮空気分配ユニット、アクチュエータ モータ、およびアクチュエータへの圧縮空気伝達システムの 4 つのユニットに分割できます。
空調ユニットでは、空気が乾燥され、塵が除去されます。プログラムに従って、分配ブロックは駆動モーターのキャビティへの圧縮空気の供給を (バルブの助けを借りて) 開閉します。
バルブは通常、電磁石によって、または空気圧によって操作されます (環境が爆発性の場合)。エグゼクティブ エンジン ブロックは実際には、回転または直線運動するピストンを備えたシリンダーです。つまり、指定された変位、力、速度が異なる空気圧シリンダーです。
各エンジンには独自の作業サイクルがあり、サイクルの順序は技術プロセスによって厳密に決定され、対応するプログラムによって制御されます。 ロボット制御システム… 圧縮空気をさまざまなデバイスに送るシステムは、当面のタスクに応じて、さまざまなセクションの空気圧ドライブを使用します。
原理的に、空気圧ドライブにおけるエネルギーの伝達と変換は次のようになります。原動機はコンプレッサーを駆動し、空気を圧縮します。次に、圧縮空気は制御装置を介して空気圧モーターに供給され、そこでそのエネルギーが機械エネルギー (ピストン、ロッドの動き) に変換されます。その後、作動ガスは環境中に排出され、コンプレッサーには戻りません。
空気圧ドライブの利点は、どれだけ誇張してもしすぎることはありません。液体と比較すると、空気は圧縮性が高く、密度や粘性が低く、より液体です。空気の粘度は圧力と温度とともに増加します。
しかし、空気には常に少量の水蒸気が含まれており、潤滑特性がないため、チャンバーの作業面に結露が発生して悪影響を及ぼすリスクがあります。したがって、空気圧ドライブには調整が必要です。つまり、作業環境として使用されるドライブの耐用年数を延ばすために、事前にそのような特性が与えられています。