プログラマブルコントローラのプログラム作成とコンパイル手順
装置の制御機能はプロセス技術と組織によって決まります。したがって、一般に、それらは各ユニットまたはサイトに非常に特殊かつ個別的です。しかし、オートメーション システム用の効率的でモバイルかつ柔軟なソフトウェアを開発するという問題が提起され、解決される場合、複雑な制御機能は通常、「有効化」、「無効化」、「実装の遅延」などの単純な基本アクションのセットとして表されます。 。
これらの立場から、ほとんどの制御機能は条件付きで 2 つに減らすことができます。これは、論理的タスクや規制的タスクなど、あらゆるタスクに非常に一般的です。前者は一般的な時間アクション アルゴリズムとして知られ、後者は時間パラメーターとして知られています。技術機器を制御するためのそのような典型的な機能の最も一般的な表現を図に示します。 1、a、b。
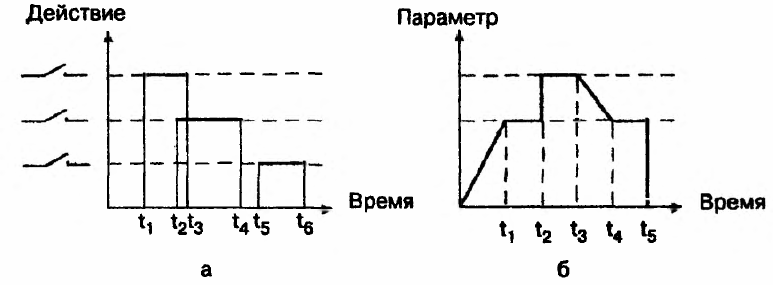
米。 1. プロセス装置の代表的な制御機能
技術機器の各具体例に実装されている制御機能の定量的特性の分析に基づいて、技術要件を策定できます。 プログラマブル ロジック コントローラー (PLC) へ 精度、速度、解決する並列タスクの数、メモリの量、周辺機器の構成、対話ツールなどの制御手段として。
IEC 61131-3 規格では、PLC 市場の世界リーダーによる最も成功した独自開発の研究から生まれた 5 つのプログラミング言語について説明しています。
-
リレー接点回路 (RKS) またはラダー図 LD (ラダー図) の言語、
-
ファンクションブロックダイアグラム (FBD) 言語、FBD (ファンクションブロックダイアグラム)、
-
IL (命令リスト) 言語 — アキュムレータとラベル遷移を備えた典型的なアセンブラ、
-
ST (Structured Text) 言語は高級テキスト言語であり、
-
SFC (Sequential Function Chart) チャート。 SFC の起源はペトリネットにあります。
PLC 言語は非常に独創的であり、よく知られているコンピューター プログラミング言語とは大きく異なります。
この規格は、PLC 開発者にすべてのプログラミング言語を実装することを義務付けているわけではありません。通常、小規模な PLC メーカーは複数または単一の言語を実装しています。多くの点で、特定のプログラミング言語を使用する優先順位は、業界またはアプリケーション分野の歴史的に確立された伝統に依存します。
プログラミング言語と PLC モデルの標準化により、PLC 用のプログラミング システムの設計に従事する専門会社が出現し、さまざまなレベルでプログラミング言語から機械語への移行を提供します。
-
プログラムに入るとき。
-
レンダリング時。
-
別個のコマンドまたはプログラム領域を変更または移動するとき。
-
構文エラーが検出され、オペレーターに通知されるとき。
これらのタスクを実行するために、プログラミング システムはローカル モード、つまりコントローラーから独立して正常に動作できます。これにより、プログラマーは、制作ワークショップ、つまり創造的なプロセスに適した環境ではなく、任意の便利な場所からプログラムを作成する機会が得られます。モデリングが可能になると、プログラムのデバッグプロセスが大幅に容易になり、作業の体系化が改善されます。

プログラマブル コントローラの準備とプログラミングの主な段階は次のとおりです。
1. 制御対象システム (制御対象) が何を行うべきか、制御目標と制御システムによって実行されるその他の追加機能、時間に対するアクチュエータによって実行される動作のシーケンス、およびセンサーと制御デバイスの状態を決定します。
2. プログラムのアルゴリズムをグラフィック形式で作成します。
3. サイトの管理に必要なセンサー、制御デバイス、アクチュエーター、アラーム、その他の機器を接続するためにどのモジュールが必要かを決定します。
モジュールを選択するときは、入出力信号のパラメータ (電圧および電流レベル) とモジュールの機能を分析します。使用可能性に注意してください スマートモジュール、入力信号の前処理と一部のローカル制御機能を実行できるため、プログラミングの複雑さが大幅に軽減されます。
4.制御対象のすべての入出力デバイスと制御プロセスで使用される機器をコントローラモジュールに接続するための図または表を作成します。
5. PLC プログラミング言語の 1 つで、特定の一連の操作とそれらの相互接続を実行し、起こり得る緊急事態を発生させるプログラムを作成します。
6. プログラムに構文エラーがないかどうかを確認して修正し、実行時エラーがないかどうかを確認して適切な修正を加えます。
7. プログラムと必要なすべての動作パラメータをコントローラに書き込みます。
8. 制御システムが完全に組み立てられた後、実際の制御プロセスでプログラムを確認し、必要に応じてより詳細な設定を行います。
9. 最後のプログラムのコピーを 2 つ保存し、別々の場所に保管します。