プログラマブルロジックコントローラ用LAD言語プログラム例
主要かつ非常に一般的なプログラミング言語の 1 つ 産業用ロジックコントローラー (PLC) はラダー ロジック言語、つまりラダー ダイアグラム (Eng. LD、Eng. LAD、ロシア語 RKS) です。
このグラフィカル プログラミング言語はスイッチング ダイアグラムの表現に基づいており、LAD 言語のノーマル クローズおよびノーマル オープンの接点要素を電気回路内のノーマル クローズおよびノーマル オープンのスイッチに接続できるため、電気技術者にとって便利です。
XX 世紀半ば以降、リレー自動化システムは何世紀にもわたって産業界で広く使用されてきました。 70年代初頭。リレーマシンは徐々にプログラマブルコントローラーに置き換えられ始めました。しばらくの間、両方が同時に働き、同じスタッフが配置されました。したがって、リレー回路を PLC に「転送」するタスクが登場しました。
リレー回路のソフトウェア実装のためのさまざまなオプションが、ほぼすべての大手 PLC メーカーによって作成されています。LAD はそのプレゼンテーションの単純さにより当然の人気を博し、これが LAD が IEC 規格に組み込まれる主な理由となりました。
LAD コマンドの構文は、ラダー記述言語の構文とよく似ています。この表現により、さまざまな接点、コンポーネント、出力要素 (コイル) を通過するタイヤ間の「エネルギーの流れ」を追跡できます。
常開接点や常閉接点などのスイッチング回路要素は、セグメントにグループ化されます。 1 つ以上のセグメントが論理ブロック コード セクションを形成します。
LAD 言語で書かれたプログラム インターフェイスは、制御 LAD プログラムが周期的で、垂直バスによって左から接続された行で構成され、回路内の電流の流れの有無が結果に対応するため、明確かつシンプルです。 論理演算 (true - 電流が流れます。false - 電流が流れません)。
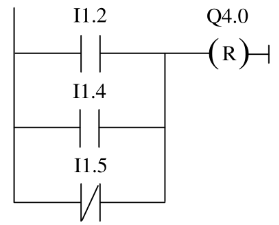
写真 1 と 2 は、コンベア モーターを制御するための 2 つのアクションを LAD 言語で記述したプログラムの一部を示しています。
-
「スタート」ボタンを押すとエンジンが始動します。
-
«Stop» ボタンを押すか、センサーを作動させるとエンジンが停止します。

米。 1. «スタート»ボタンを押してエンジンを始動する
米。 2.「停止」ボタンを押すかセンサーを作動させた後、エンジンを停止する
2 番目のタスクは、コンベア ベルトの移動方向を決定することです。物体の移動方向を決定するために 2 つの光電センサー (REV 1 と REV 2) がベルトに取り付けられているとします。どちらも常開接点として動作します。
図では。 3 ~ 4 は、3 つのアクションに対する LAD 言語プログラムのセグメントを示しています。
-
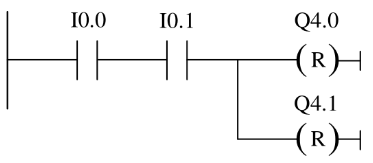
入力 10.0 で信号が «0» から «1» (立ち上がりエッジ) に変化し、入力 I0.1 での信号の状態が «0» に等しい場合、コンベア ベルト オブジェクトは左に移動します。
-
入力 10.1 で信号が «0» から «1» (立ち上がりエッジ) に変化し、入力 I0.0 での信号の状態が «0» に等しい場合、コンベア ベルト オブジェクトは右に移動します。
-
両方の光センサーが覆われている場合は、物体がセンサーの間にあることを意味します。
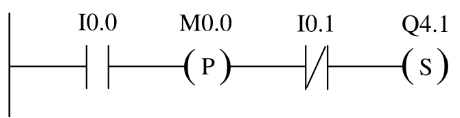
米。 3. 入力 I0.0 が状態を «0» から «1» に変更し、入力 I0.1 が «0» に等しい場合のオブジェクトの左への移動
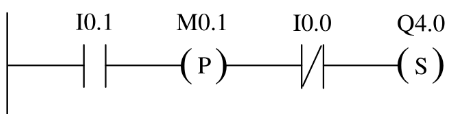
米。 4. 入力 I0.1 が «0» から «1» に変化し、入力 I0.0 が «0» に等しい場合、オブジェクトを右に移動します。
米。 5.センサー間の物体の検索
図では。 3 - 4 表記法を採用:
-
入力 1.0 (REV 1) — 光センサー # 1;
-
入力 10.1 (REV 2) — 光センサー # 2;
-
M0.0 (PMV 1) — タイムマーカー No. 1;
-
М0.1 (РМВ 2) — タイムマーカー No. 2;
-
出力 Q4.0 (LEFT) — 左移動インジケーター。
-
出力 Q4.1 (RIGHT) — 右移動インジケーター。
図では。図 6 ~ 9 は、最も単純な 4 アクションのタイマー プログラムを示しています。
-
タイマー T1 atus が「0」に等しい場合、T1 の時間値 250 ms が開始され、T1 は拡張パルスタイマーとして開始されます。
-
タイマーの状態は補助トークンに一時的に保存されます。
-
タイマー T1 の状態が «1» の場合、ラベル M001 に進みます。
-
タイマー T1 が期限切れになると、タグ ワード 100 が«1» ずつ増加します。
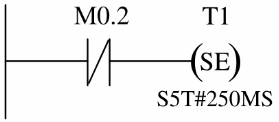
米。 6. 拡張パルススタートタイマー

米。 7…タイマー状態を補助タグに一時保存
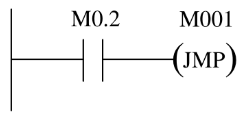
米。 8… レーベルに移動

米。 9… タイマー T1 が期限切れになると、マーカーを «1» ずつインクリメントします
ロゴコントローラ用サンプルLAD言語プログラム
ユニバーサルロジックモジュールのロゴ! は、論理的な情報処理を使用して最も単純な自動化タスクを解決するように設計された、コンパクトで機能的に完全な製品です。

米。 10. ロゴモジュール
ロゴモジュールを使ってみよう!問題管理を解決しました。私は管理棟と生産棟のシャワー室の暖房システムです。
加熱システムの構成には次のコンポーネントが含まれます。
-
暖房用に使用される 3 つの加熱ボイラー。
-
冷却液を循環させる 3 つのポンプ。
-
配管および加熱レジスター。
制御システムは、シャワー キャビン内の温度と圧力を制御する必要があります(最初のレベルは低く、充填システムがオンになっている場合はさらなる作業が可能であり、2 番目の臨界レベルはさらなる作業が禁止されます)。 、暖房システムの冷却剤の温度の制御と同様に、エネルギー資源(電気、ガス)の不足。
さらに、追加の加熱源、例えば電気ヒーターを加熱システムに設けることができる。電気ヒーターを 1 日に 3 回オンにします。600 から 800。 1500年から1700年まで。 23:00 から 01:00 まで… 従業員がシャワーに行くときに何らかの理由で気温が通常より低い場合は、電気ヒーターが追加でオンになります。
以下は入力と出力として使用されます。
-
AI1 — 冷却剤の臨界圧力レベルに対する圧力センサーからの入力信号。
-
AI2 — さらなる動作を可能にする、低レベルの冷却剤圧力に対する圧力センサーからの入力信号。
-
AI3 — 冷却剤の動作温度を上げるための温度センサーからの入力信号。
-
入力 13 — 電力不足の入力信号。
-
入力 14 — 天然ガス不足の入力信号。
-
出力 Q1 — 加熱システム (循環ポンプ #1) をオンにする出力信号。
-
出力 Q2 — 充填システムをオンにする出力信号。
-
出力 Q3 は、加熱システム (加熱ボイラー No. 1) のボイラーをオフにする出力信号です。
-
出力 Q4 は、ボイラーへのガス供給を中断する出力信号です。
-
出力 Q5 — 加熱システム (循環ポンプ #2) をオンにする出力信号。
-
出力 Q6 — 加熱システム (循環ポンプ No. 3) をオンにする出力信号。
-
出力 Q7 は、加熱システム (加熱ボイラー No. 2) のボイラーをオフにする出力信号です。
-
出力 Q8 は、加熱システム (加熱ボイラー No. 3) のボイラーをオフにする出力信号です。
-
C2 — スタートボタン。
-
B001 は 3 つのモードを備えた 7 日間タイマーです。
電気ヒーターの場合:
-
AI1 — シャワールームの温度を表す温度センサーからの入力信号。
-
出力 Q1 — 電気ヒーター (電気ヒーター No. 1) をオンにする出力信号。
-
出力 Q2 — 電気ヒーター (電気ヒーター No. 3) をオンにする出力信号。
-
出力Q3は、電気ヒータ(電気ヒータ#3)をオンにする出力信号である。
ソフトウェアパッケージ「LOGO!」内のリレー接点シンボル (LAD) 形式のプログラミング言語で書かれた自動加熱制御システム用のプログラム。ソフトな履き心地»を図に示します。 11と12。
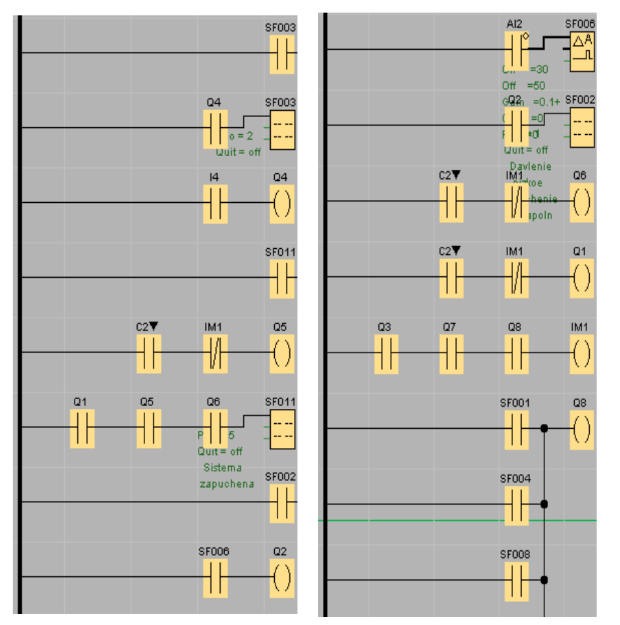
米。十一。最初の FraG LAD 言語プログラム
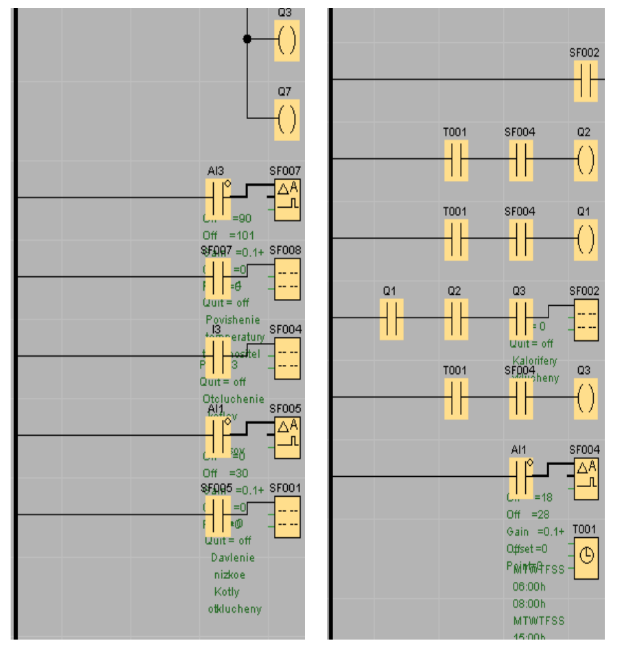
米。12… LAD 言語プログラムの 2 番目のフラグメント