メカトロニクス、メカトロニクス要素、モジュール、機械、システムとは
「メカトロニクス」という言葉は、「メカニクス」と「エレクトロニクス」の2つの言葉から構成されています。この用語は、1969 年に安川電機の上級開発者である日本人の森哲郎によって提案されました。 20 世紀、安川電機は電気ドライブと DC モーターの開発と改良に特化し、この方向で大きな成功を収めました。たとえば、最初のディスクアーマチュア DC モーターが安川電機で開発されました。
これに続いて、最初のハードウェア CNC システムに関する開発が行われました。そして1972年にここにメカトロニクスブランドが登録されました。同社はすぐに電気駆動技術の開発で大きな進歩を遂げました。その後、同社は「メカトロニクス」という言葉が日本だけでなく世界中で広く使用されていたため、商標から外すことを決定した。

いずれにせよ、日本は、高精度の電気駆動制御を実装するために機械要素、電気機械、パワーエレクトロニクス、マイクロプロセッサ、ソフトウェアを組み合わせる必要が生じたとき、このようなアプローチの技術開発が最も活発に行われてきた国です。
メカトロニクスの一般的なグラフィック シンボルは、RPI (米国ニューヨーク州レンセラー工科大学) の Web サイトからの図です。
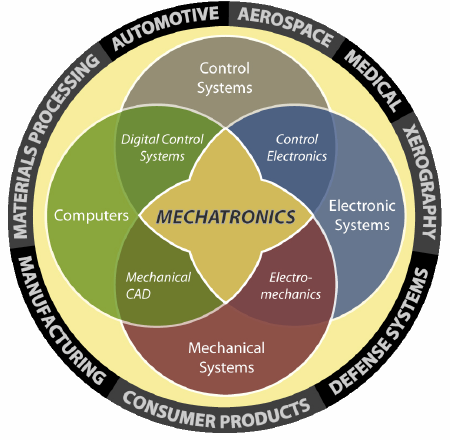
メカトロニクスは世界で最も新しい工学分野の 1 つであり、ユネスコによると、最も将来性があり、最も人気のある 10 分野の 1 つです。
一般に「メカトロニクス」という用語は次のように定義されます。精密機械、電気工学、エレクトロニクス、マイクロプロセッサ技術、各種動力源、電気、油圧、などの単位を体系的に組み合わせた科学技術分野です。空気圧ドライブとそのインテリジェント制御は、最新の自動生産システムのブロックの作成と操作に焦点を当てていました。
メカトロニクスとは、コンピュータによるモーションコントロールのことです。
メカトロニクスの目標は、質的に新しいモーション モジュール、メカトロニクス モーション モジュール、インテリジェント メカトロニクス モジュール、そしてそれらに基づいて動くインテリジェントな機械やシステムを作成することです。
歴史的に、メカトロニクスは電気機械学から発展し、その成果に基づいて、電気機械システムとコンピュータ制御デバイス、組み込みセンサーおよびインターフェイスを体系的に組み合わせることでさらに発展しました。

メカトロニクスシステムの図
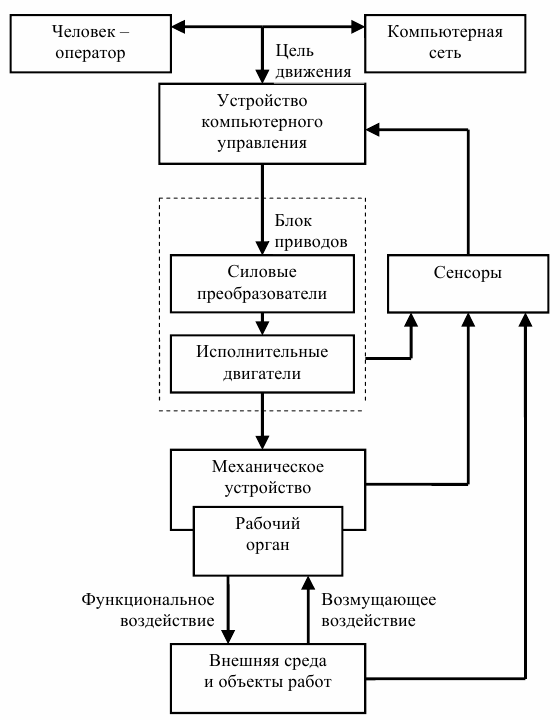
メカトロニクスシステムの一般化された構造
電子、デジタル、機械、電気、油圧、空気圧および情報要素は、最初は異なる物理的性質の要素としてメカトロニクス システムの一部となることができますが、システムの質的に新しい結果を得るために統合されるため、これは達成できません。それぞれの要素ごとに、あるいは個別のパフォーマーごとに。

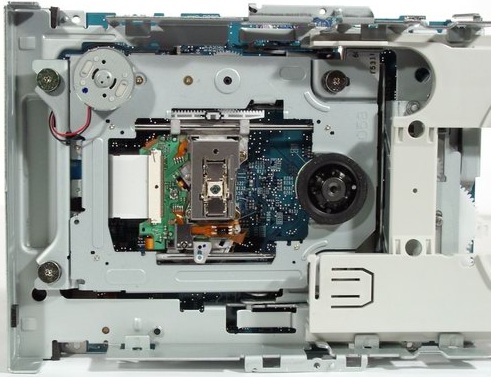
別個のスピンドル モーターは単独で DVD プレーヤー トレイを取り出すことはできませんが、マイクロコントローラー ソフトウェアを使用し、ウォーム ギアに適切に接続された回路の制御下では、すべてが簡単に機能し、単純なモノリシック システムのように見えます。ただし、外部の単純さにも関わらず、定義上、メカトロニクス システムには、特定のタスクを解決するために特定の機能動作を実行するために相互接続および相互作用する複数のメカトロニクス ユニットとモジュールが含まれています。
メカトロニクス モジュールは、コンポーネントの相互浸透と目的を持ったハードウェアとソフトウェアの統合を同時に行い、動作を実行するように設計された (構造的および機能的に) 独立した製品です。
典型的なメカトロニクス システムは、相互接続された電気機械コンポーネントと電力コンポーネントで構成され、これらはコンピューターまたはマイクロコントローラーによって制御されます。
このようなメカトロニクス システムを設計および構築するとき、デバイスの質量特性を改善するだけでなく、信頼性も高めるために、不必要なノードやインターフェイスを避け、すべてをできるだけ簡潔かつシームレスにしようとします。システム全般のこと。
エンジニアにとって、それは時には容易ではありません。異なるユニットが異なる作業条件にあり、まったく異なることを行っているという事実により、非常に珍しい解決策を見つけることを余儀なくされることがあります。たとえば、場所によっては従来のベアリングが機能しなくなり、電磁サスペンションに置き換えられます(特に、パイプにガスを送り込むタービンでこれが行われます。従来のベアリングでは、ガスが内部に侵入するためすぐに故障してしまうためです)。その潤滑剤)。
今日、メカトロニクスは何らかの形で、家庭用電化製品から建設ロボット、兵器、航空宇宙に至るまであらゆるものに浸透しています。すべての CNC マシン、ハードドライブ、電気錠、車の ABS システムなど。 — どこでも、メカトロニクスは便利であるだけでなく、必要でもあります。手動制御ができる場所は今ではほとんどありません。すべては、固定せずにボタンを押したか、単にセンサーに触れただけで結果が得られたという事実に帰着します。これは、おそらく今日のメカトロニクスの最も原始的な例です。
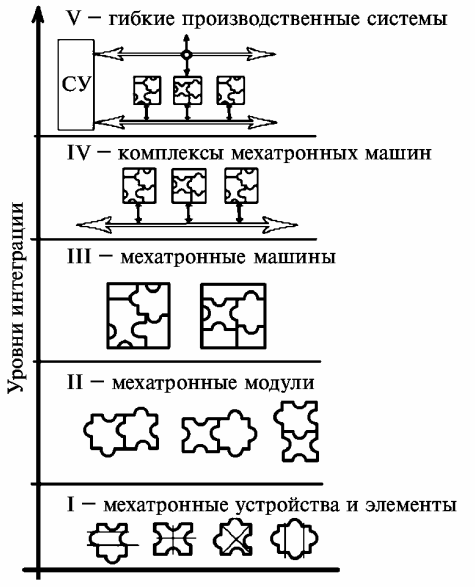
メカトロニクスにおける統合レベルの階層図
最初のレベルの統合は、メカトロニクス デバイスとその要素によって形成されます。 2 番目の統合レベルは、統合されたメカトロニクス モジュールによって形成されます。統合の 3 番目のレベルは、統合メカトロニクス マシンによって形成されます。統合の第 4 レベルは、メカトロニクス機械の複合体によって形成されます。 5 番目の統合レベルは、メカトロニクス機械とロボットの複合体の単一統合プラットフォーム上に形成され、再構成可能な柔軟な生産システムの形成を意味します。
現在、メカトロニクス モジュールとシステムは次の分野で広く使用されています。
-
機械工学および自動化装置、機械工学の技術プロセス。
-
産業用および特殊ロボット工学。
-
航空および宇宙技術。
-
軍事装備、警察および特殊サービス用の車両。
-
電子工学およびラピッドプロトタイピング装置。
-
自動車産業 (モーターホイールドライブモジュール、アンチロックブレーキ、オートマチックトランスミッション、自動駐車システム);
-
非従来型車両(電気自動車、電動自転車、車椅子)。
-
オフィス機器(コピー機やファックスなど)。
-
コンピュータ周辺機器 (例: プリンタ、プロッタ、CD-ROM ドライブ);
-
医療およびスポーツ機器(障害者用の生体電気および外骨格プロテーゼ、調子を整えるトレーナー、制御された診断カプセル、マッサージ器など)。
-
家庭用電化製品(洗濯、裁縫、食器洗い機、独立した掃除機)。
-
マイクロマシン(医学、バイオテクノロジー、通信および電気通信用)。
-
制御および測定装置および機械。
-
エレベーターや倉庫の設備、ホテルや空港の自動ドア。写真およびビデオ機器 (ビデオディスク プレーヤー、ビデオ カメラの焦点調整装置)。
-
複雑な技術システムのオペレーターとパイロットを訓練するためのシミュレーター。
-
鉄道輸送(列車制御および安定化システム)。
-
食品、食肉、乳製品産業向けのインテリジェントマシン。
-
印刷機。
-
ショー業界、アトラクション向けのスマート デバイス。
それに伴い、メカトロニクス技術を持った人材のニーズが高まっています。