間接電気コントローラー
 電気および電子コントローラーは、電気エネルギーを使用してドライブを制御します。
電気および電子コントローラーは、電気エネルギーを使用してドライブを制御します。
鋳造工場や熱処理工場で位置自動制御システムを作成するには、電気接触装置を備えたさまざまな改造を施したシリアル装置が使用されます。リレートランスデューサ (バイメタル、膨張計など) を位置制御に使用できます。
温度制御回路のオンオフ
乾燥オーブンの 2 位置温度調整スキーム (図 1) では、乾燥オーブンの加熱システムは、作業スペースの温度が許容温度よりも低くなった場合に、加熱が行われるように配置されています。要素 EK1 は高電力でオンにする必要があり、温度が許容値よりも高くなった場合は、EK2 要素を低電力でオンにする必要があります。
測温抵抗体1は、3線式回路の電子ブリッジ2に接続された感応素子として使用される。炉内の温度が設定値から逸脱すると、温度計の電気抵抗が変化し、ブリッジの対角線に不均衡信号が表示されます。
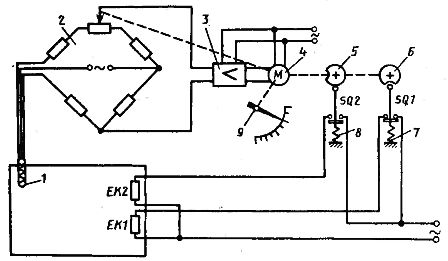
米。 1. 二位置電気温度調節器の図
電子アンプ3によって増幅された信号は、逆転モータ4の回転を駆動する。その回転方向は、アンバランスの符号、すなわち、設定値からの温度偏差の符号に依存する。 2 つのディスクが電気モーターのローターに運動学的に接続されています: 5 と b。その位置はローターの回転角度、つまりスライド ワイヤーの位置とブリッジの矢印 9 に依存します。
接点 SQ1 と SQ2 のガイドは、バネ 7 と 8 によってディスクに押し付けられています。ディスクが回転すると、目盛りの始点からディスクの谷までの計器の読み取り間隔で接点 SQ2 が閉じます。 5、谷から岩の最上部までの間が開けている。逆に、接点 SQ1 は、スケールの始まりからディスク 6 の谷までは開き、谷からスケールの最大値までの区間では閉じます。
下限温度に達すると、接点 SQ1 が閉じ、高出力加熱要素 EK1 がオンになります。上限温度に達すると、接点 SQ2 が閉じ、接点 SQ1 が開き、温度が徐々に低下します。下限温度に達するとすぐに、この状況が繰り返されます。
図では。図2は、保護雰囲気を有するチャンバー炉タイプSNZ−4、0.8、0.2、6/10の作業空間における2位置温度調節の回路図を示す。オーブンは三相であり、FU ヒューズを介してオーブンに接続されています。加熱要素はコンタクタを使用してオン/オフに切り替えられます。温度の安定化は自動制御システム (ACS) によって行われます。
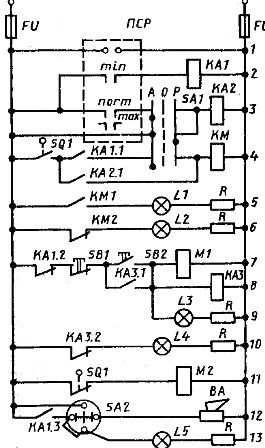
米。 2. 保護雰囲気を備えたチャンバー電気炉の作業空間の温度を調整するための電気回路
制御回路は13回路で構成されています。機能特性に基づいて、制御回路、保護回路、情報回路に分類できます。制御は、炉の作業スペースの温度(自動および自動制御システムが故障した場合は手動)、炉への保護雰囲気の供給、ガスカーテンの供給によって実行されます。情報スキームは、光と音の信号によって炉のさまざまな動作モードについて操作員に警告するために使用されます。
オーブンには 1 つのゾーンがあり、温度調整は、熱電対、補償線、ポテンショメータ PSR、中間リレー KA1 および KA2、コンタクター KM、そして最後にオーブン自体 SNZ-4,0.8,2.6 / 10 で構成される自動制御システムを使用して実行されます。 PSR ポテンショメータは、回路 1、2、および 3 を使用して制御回路に接続されています。回路 1 は、PSR デバイス自体に電力を供給する役割を果たします。
回路 2 と 3 には、PSR サーモスタットの最小 (min.) 接点と通常 (通常) 接点が含まれています。 PSRの最大接点(max)は回路内では使用しておりません。回路 2 および 3 では、制御信号が生成され、中間リレー KA1 および KA2 の助けを借りて、駆動コイル (KM コンタクター) を作動させるのに必要な値まで増幅されます。したがって、KA1 と KA2 は電力信号増幅器として機能します。
回路 3 と 4 には、自動 (A)、オフ (O)、および手動 (P) のユニバーサル 3 ポジション トグル接点があります。これらの各位置は、炉の特定の動作モードに対応しています。炉内の温度の自動制御、炉の電源がオフになっている、手動の温度制御(モードを調整するときまたは自動制御システムが故障した場合のみ) 。
回路 4 には接触器が含まれており、したがってヒーター自体も含まれています。コンタクタは、オーブンのドアが閉じている場合にのみオンにできます。後者は、回路 4 にリミット スイッチ SQ1 を導入することによって実現され、オーブンのドアが開くとオフになります。コンタクタコイルとそれに応じてその接点の直接スイッチオンは、次のように実行されます: 自動制御の場合 - 中間リレー KA1 および KA2 の接点を通じて、手動制御の場合 - 接点 KA2.1 のみを使用します。
コイル KA1 は、炉内の温度が最低値に達した場合にのみオンになります。コイル KA2 はオーブン内の常温に相当する接点に接続されています。したがって、炉の温度が設定値と等しくなった場合でも、炉の加熱要素はオンのままになります。オーブン内の温度が標準を超えた場合にのみ、ヒーターは主電源から切断されます。このようにしてオーブン内の温度の安定を制御する回路が構成されています。
現在オーブンがオンかオフかを、L1 と L2 の 2 つの信号ランプで知らせます。発熱体がオンの場合は L1 信号ランプが点灯し、ヒーターがオフの場合は L2 ランプが点灯します。これは、回路 5 と回路 b のコンタクタ KM の接点を接続することによって実現されます。回路 5 および 5 の抵抗 R は、信号ランプの電圧を 220 V から動作電圧まで下げるために必要です (ランプ回路の抵抗は負荷抵抗の役割を果たします)。回路 7、8、および 11 は、保護雰囲気とガス カーテンの供給を制御するように設計されています。
この回路には、保護雰囲気の供給と炉内にガス カーテンを形成するためのガスの供給のためのソレノイド バルブ M1 と M2 が含まれています。
回路 7 の構造からわかるように、炉内の温度が最低温度まで下がっていない場合にのみ、炉に保護雰囲気を供給することができます (KA1 がオンになると、回路 7 は接点 KA1 を介して開きます。2) )。このシステムは防爆システムです。炉へのガス供給はボタン SB1 および SB2 を使用して手動で制御されます。 M1には遮断接点がないため、接点を多重化するためにKAZリレーが導入されています。
M1(KAZも同様)をONにすると、同時にシグナルランプL3が点灯し、ガスバルブが開いていることをサービスマンに知らせます。ガスを止める(SB1 ボタンを使用)と L3 がオフになり、別の信号ランプ L4 が点灯し、バルブが閉じていることを知らせます。
回路 12 および 13 は情報提供用です。パッケージスイッチ SA2 を使用すると、サイレンをオンにして、炉内の温度が最低値まで低下したことをサービスマンに知らせることができます。これは、何らかの故障の兆候です(通常の温度でもヒーターはオンになっているはずです) )。
したがって、最小接触最小PSRは、炉の作業空間の温度安定化センサーとしてだけでなく、自動警報および保護システムのセンサーとしても悪用されます。スイッチを 2 番目の位置 (回路 13) に移動すると、自動警告システムをオフにすることができます。 L5 ランプは、自動警報システムが無効になっていることを示します。

3位置温度制御回路
3 位置レギュレータでは、レギュレータには 3 番目の位置があり、制御変数の値が指定された値と等しい場合、オブジェクトには通常の動作に必要な量のエネルギーと物質が供給されます。 。
3 つの中間リレーが接点 SQ1 と SQ2 を使用して制御される場合、3 位置制御回路は、考慮されている 2 位置制御回路 (図 1 を参照) を変換することによって得られます。接点 SQ1 が閉じると、リレー K1 がオンになります。 SQ2 が閉じると、リレー K2 が作動します。接点 SQ1 と SQ2 が両方とも開いている場合、短絡リレーが作動します。これら 3 つのリレーの助けを借りて、発熱体をデルタ、スターでオンにしたり、オフにしたりすることができます。つまり、3 位置の温度制御を実行できます。
比例制御則を適用した自動制御システムを構築するには、BR-3 タイプのバランスリレーがよく使用されます。このリレーは2本の滑り線を使用しています。制御量の値により、一方のスライドのスライド位置 (センサー) と、調整体の開度、つまりアクチュエータ スライドのスライド位置 (フィードバック) が決まります。
バランスリレーの役割は、2 つのスライダーのスライダー位置が対称になるようにドライブに影響を与えることです。
バランスリレーBR-3のスキームでは(図2)3) 主な要素は、有極リレー RP-5 と出力リレー BP1 および BP2 です。スライドの位置は対称ですが、有極リレーの 2 つのコイルに流れる電流の強さは等しいため、接点はオープンになります。出力リレー BP1 および BP2 は通電されておらず、それらの実行接点は開いています。
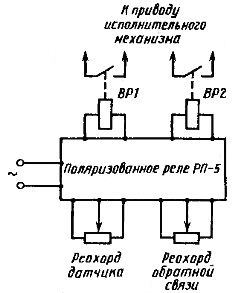
米。 3. バランスリレータイプBR-3の簡易ブロック図
制御値がずれた場合(例えば増加時)、センサースライダーのスライダーの位置が変化します。その結果、ブリッジの対称性と有極リレーの巻線を流れる電流のバランスが崩れ、対応する接点が閉じます。この場合、出力リレーが作動し、その接点に駆動装置が含まれており、制御値を減少させる方向に調整体を移動させる。フィードバックスライダーのスライダーも同時に動きます。
ドライブは、フィードバック スライド ワイヤのスライダーがセンサー スライド ホイールの位置を占めるまで動作し、その後再び平衡が生じます。リレー接点が開き、ドライブが停止します。これにより、制御変数の値とコントローラーの位置の間に一定の関係が得られます。
I法、PI法、その他の法則を適用する自動制御システムを作成するには、IRM-240、VRT-2、EPP-17などのタイプのレギュレータを含むさまざまな電子コントローラが使用されます。