電磁リレーの基本パラメータと特性
 リレー制御法則を適用した電気機器をリレーといいます。 リレーでは、制御(入力)パラメータがある設定値まで滑らかに変化すると、制御(出力)パラメータが急激に変化します。また、これらのパラメータのうち少なくとも 1 つは電気的なものでなければなりません。
リレー制御法則を適用した電気機器をリレーといいます。 リレーでは、制御(入力)パラメータがある設定値まで滑らかに変化すると、制御(出力)パラメータが急激に変化します。また、これらのパラメータのうち少なくとも 1 つは電気的なものでなければなりません。
機能器官の働き 電磁リレー 図の図に従って追跡できます。受信体Aは、磁気回路1のコイル2に供給される入力値(電圧)Uinを中間値、すなわちVinに変換する。アンカーの機械的力 3。アンカーの機械的力 FЯ は、実行体 B の接触システムに作用します。アンカーの力 FЯ は、入力値 Uin に比例し、中間値と比較されます。中間体 B のバネ 9 によって発生する力 Fpr の所定の値。Uin < Uav、Fya の場合
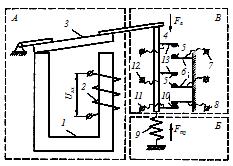 米。 1 電磁リレーの仕組み
米。 1 電磁リレーの仕組み
動作の過程で、電磁リレーは時間スケールで 4 つのフェーズを区別します。作動期間 (時間) tav、動作期間 2rk、シャットダウン期間 (時間) tooff、休止期間 (時間) tp (図2)。
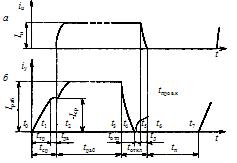
米。 2. 出力 (a) と出力 (b) の量の時間依存性
電磁リレーの作動期間
 応答期間には、入力信号が監視本体に影響を与え始めた瞬間から、信号が制御回路に現れるまでの時間間隔が含まれます。横軸のセグメント tav = t2 –t0 は、図のこの期間に対応します。 2、b.時刻t0において、リレーコイルの電流は、アーマチュアに作用する電磁力Feが中間体のばね力Fm(機械力)に対抗し始める値まで増加する。入力値は許容値と呼ばれます。
応答期間には、入力信号が監視本体に影響を与え始めた瞬間から、信号が制御回路に現れるまでの時間間隔が含まれます。横軸のセグメント tav = t2 –t0 は、図のこの期間に対応します。 2、b.時刻t0において、リレーコイルの電流は、アーマチュアに作用する電磁力Feが中間体のばね力Fm(機械力)に対抗し始める値まで増加する。入力値は許容値と呼ばれます。
初期期間は、セグメント ttr = t1 — t0 に対応します。時刻t1において、リレー電磁石のアーマチュアが動き始める。 tdv = t2 — t1 の間、アンカーが移動し、中間体 B (図 1 参照) の抵抗に打ち勝ち、実行体 C を活性化します。
アーマチュアのストロークの終わりに、駆動接点が閉じ、負荷電流 (図 2、a) がゼロから平衡値まで増加し始めます。出力回路の制御が開始される入力値を許容値(Iav)といいます。 Isr に対応する動力 Psr を作動動力といいます。
応答時間 t cf = ttr + tdv。
電磁リレーの応答時間は 1 ~ 2 ミリ秒から 20 ミリ秒までさまざまです。電磁式タイムリレーは最大 10 秒の遅延を提供します。
リレーの応答時間を推定するには、次の式を使用できます。
t cf = t1kz-bm –a、
ここで、t1 は、指定された安全係数 ks および係数 m = 1 の場合の応答時間です。 a、b — リレーの種類とkzおよびmの値に応じて決定される係数。
kz = 1.5¸2 の高速リレーの場合、係数 a の値は 1 に近づきます。 k z = 1.5¸3、値 a = 0.25¸0.95 の通常のリレーの場合、係数 b の値は通常 1.4 ~ 1.6 の範囲にあります。
電磁リレーの動作期間
 作業期間には、時間間隔 twork = t3 — t2 が含まれます。出力回路の制御の瞬間 t2 から入力信号の敏感な器官への影響の終了の瞬間 t3 までの時間。電流は Iwork の定常値まで上昇し始めます (図 2、b)。これは入力値の動作値であり、リレーの信頼性の高い動作が保証されます。
作業期間には、時間間隔 twork = t3 — t2 が含まれます。出力回路の制御の瞬間 t2 から入力信号の敏感な器官への影響の終了の瞬間 t3 までの時間。電流は Iwork の定常値まで上昇し始めます (図 2、b)。これは入力値の動作値であり、リレーの信頼性の高い動作が保証されます。
比 Iwork / Icr = kz は、作業における安全率と呼ばれます。
リレーの敏感な要素の過負荷容量を特徴付けるために、操作量の制限値 Ioperating.max と呼ばれる入力量の値が使用されます。
作動値の制限 — これは、敏感な器官が正規化された短期間に耐えることができる値です。ただし、リレーが通常モードで動作している場合、電気的、機械的強度、または発熱の状態により、この値は許容できません。
制御電力コンセプト Ru は、リレー ドライブの耐荷重能力を特徴付けるために使用されます。制御電力は、ドライブが長時間伝送できる制御回路内の電力です。
電磁リレートリップ周期
 オフ期間には、時間間隔 toff = t6 — t3 が含まれます。知覚器官への衝撃が停止した瞬間t3から、制御回路内の電流がゼロに減少する瞬間までの時間(図16、a)。
オフ期間には、時間間隔 toff = t6 — t3 が含まれます。知覚器官への衝撃が停止した瞬間t3から、制御回路内の電流がゼロに減少する瞬間までの時間(図16、a)。
オフ期間には、リレーがオフになるリリース期間 totp = t4 — t3 が含まれます。リレーコイルの電流 iy はゼロまで低下します (図 2、b)。この期間中、反対側のバネ力 (機械力) が電磁力を超えます。 Fm>Fe となりアーマチュアが解放されます。
接点故障を選択した後 (tc = t5 ~ t4 の間隔)、リレー接点が開き、接点間でアークが点火され、時間 td = t6 ~ t5 後に消えます。期間 td の間、制御される回路の電流は In からゼロに減少します (図 2、a)。
オフ時間 t t = tp + tc + td。
トリップ期間は、ドロップ電流 Iotp とピックアップ電流 Iav の比である回復係数によって特徴付けられます: kv = Iotp / Icr。
通常、電力システム保護リレーおよび入力パラメータを狭い制限内で制御する制御リレーの場合、kv は 1 に近づく必要があります。
電磁リレーの休止期間
休止期間は、時間間隔 tp = t7 — t6 です。
待ち時間は、リレーが動作しない、または保持されることを保証する入力量の最大値である非動作値と呼ばれるパラメータによって特徴付けられます。シャットダウン時間は動作開始時間やリリース時間よりも短いです。
制御電力と作動電力の比はゲイン、ku = Py / Pcr と呼ばれます。
単位時間あたりの起動回数は、サイクル タイムに反比例する値によって決まります。
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
ラコタ大学OB