トロリーバスの仕組みと仕組み
多くの都市の住民はトロリーバスに乗り慣れているため、現時点では複数人乗りの電気自動車のような環境に優しく、非常に経済的な交通手段を利用しているという事実をほとんど考えていません。一方、トロリーバスの装置は、たとえば路面電車の装置と同じくらい興味深いものです。このトピックについてもう少し詳しく見てみましょう。
最近のトロリーバスにはかなり複雑な電気部品が搭載されています。その制御システムはマイクロプロセッサによって制御される半導体に基づいており、エアサスペンション、ABS システムと連動し、複雑な電子情報システムのすべての部分と密接に相互作用します。これには、自律移動、微気候調整システムなどの可能性が含まれます。
このように、今日のトロリーバスは、安全性、快適性、効率性のすべての要件を満たした本格的な都市公共車両です。

トロリーバスの進化は、バスとほぼ同じように徐々に発展しました。初期のトロリーバスの車体構造や車台は、もともとボグダン-E231やMAZ-203Tなどの低床バスをベースにしていたことが容易に推測できます。ただし、トロリーバス自体はずっと後に登場しました。そして、たとえば Electron-T191 や AKSM-321 などの現代のシティカーは、すぐにトロリーバスとして開発されました。しかし、モデル間のボディの連続性は依然として追跡できます。
19 世紀後半のトロリーバスの始祖:
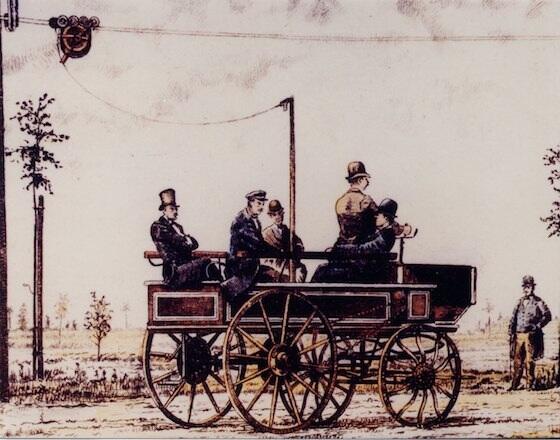
ソビエト連邦の時代からでも、架線から荷車を経由してこの車両が習慣になりました 550ボルトの定電圧が供給されます…それが標準です。このような条件下では、荷物を満載したトロリーバスは平坦な道路で約 60 km/h の速度に達します。
トラクションドライブはもともと都市交通を目的としていたため、最高速度は 65 km/h に制限されていますが、この速度でも車両は接触線の片側または反対側 4.5 メートル以内で簡単に操縦できます。次に、この注目すべき車両の電気コンポーネントに注目してみましょう。
トロリーバスの本体は、 トラクションエンジン…クラシックバージョンではこうなっています。 DCモーター: 円筒形フレーム、ブラシ収集ブロック付きアーマチュア、ポスト、エンドシールド、ファン。
ほとんどの DC トロリー モーターは直列または複合です。トランジスタまたはサイリスタ制御を備えたモーターは、直列励磁システムでのみ動作します。
いずれにせよ、トロリーバスの主電動機は非常に優れた DC 機械であり、約 150 kW の電力向けに設計されており、通常の安定した動作には追加の DC コンバータが必要です。モーター自体の重量は約 1 トンで、動作シャフト トルクが 800 N * m (シャフト速度 1650 rpm) を超える場合、消費電流は約 300 A になります。
最新のトロリーバスの一部のモデルでは、 専用のACトラクションコンバータによって駆動されるAC非同期トラクションモーター… このタイプのエンジンは、かさばらず、さらに強力であり、(コレクター エンジンと比較して) 定期的なメンテナンスを必要としません。
しかし、そのようなエンジンには特別なエンジンが必要です 半導体コンバータ… モーター自体のシャフトに一対の速度センサーが取り付けられている場合があります。ほとんどの非同期 AC トラクション モーターは 400 V で駆動され、かご型ローターと古典的な「スター」接続の三相ステーター巻線を備えています。

エンジンは通常、トロリーバスの車体後部にあります。そのドライブシャフトにはフランジがあり、その助けを借りて、カルダンシャフトからドライブギアを介してドライブアクスルまで機械的な伝達が行われます。
モーターハウジングは本体から完全に絶縁されているため、高電圧が導電部分に到達することはありません。これは、フランジが絶縁材料で作られており、ブラケットへのモータの取り付けは絶縁スリーブなしでは決して完了しないという事実によって保証されます。
最新のトロリーバスのトラクション モーターは、トランジスタ パルス制御システムによって駆動されます。 IGBTトランジスタの、これはサイリスタやさらにレオスタット回路よりも完璧であると考えられています。
このシステムには、エンジン制御回路の調整と調整、および牽引装置全体の状態の監視を目的とした診断コンピュータを接続するためのスイッチング セクションが含まれています。このような制御システムは、エネルギー消費の点で最も経済的であり、加減抵抗器システムの場合のように、不必要なエネルギー損失を生じることなく、車両の非接触始動と加速を実現します。
その結果、トラクションモーターの適切な制御により、トロリーバスの走行が可能になります。 スムーズなスタート、プッシュ不要の速度調整、信頼性の高いブレーキ。 約 50 A の電機子電流を備えた調整可能なパルス電圧により、機械式トランスミッションのバックラッシュの存在に関係なく、トロリーバスはスムーズに移動できます。
車速が 25 km/h に達すると界磁コイルの電流が弱まる可能性があるため、速度制御は無段階で行われます。ブレーキ時には、調整可能な電流も使用されます。これはと呼ばれます。 ダイナミックブレーキ.
後部のトロリーの速度制限は 25 km/h 以下で、電子機器のおかげで、発進よりも停止が優先されます。必要に応じて、パンタグラフの動作極性を変更することができます。

直接 トランジスタ・パルストロリーバスシステム は次のように動作します。フットペダルを踏むと作動します ホールセンサ、アナログ信号レベルは現在のペダル位置角度に直接関係します。
この信号はデジタルに変換され、すでにデジタル形式でトラクション ユニットのマイクロプロセッサ コントローラーに供給され、そこからコマンドがドライバーのダッシュボードに送信されます。 パワートランジスタ.
パワー トランジスタのドライバは、トラクション ユニットのマイクロプロセッサ コントローラからのコマンドに応じてパワー トランジスタの電流を調整します。ドライバーの制御電圧は低電圧 (4 ボルトから 8 ボルトまで変化します) であり、その値がトラクション モーターの巻線の動作電流を決定します。
ご想像のとおり、パワートランジスタがここで機能します 半導体コンタクタ電圧が制御されているだけで、従来のコンタクタとは異なり、電流は非常に滑らかに変化します。したがって、レオスタットは必要なく、非常にシンプルです PWM技術 (パルス幅変調)。
トロリーを停止する必要がある場合、エンジンは発電機モードに切り替えられ、基本的に電機子の磁場によって制動が行われ、これも調整され、車両がほぼ完全に停止するまで制動が行われます。ちなみに、トロリーバスの制御トランジスタ・パルス電子機器の主要部分は屋根上にあります。
最新のトロリーバスを停止する過程で、システムは機能します エネルギー回収…これは、制動中に発電機モードで主電動機によって生成されたエネルギーが連絡網に戻され、この網から並行して電力供給される電気自動車のニーズと、トロリーバス自体 (油圧式) のデバイスへの電力供給の両方に再利用できることを意味します。ハンドル、暖房システムなど)トロリーバスが矢印の下を通過する場合、 レオスタティックブレーキ.
トロリーバスの駆動装置のほぼ全体は、いくつかの部分で構成されています。
-
パンタグラフのペア。
-
サーキットブレーカー;
-
IGBT制御ユニット;
-
規制スキーム。
-
モーションおよびブレーキコントローラー。
-
加減抵抗器のブロック。
-
干渉を抑制するチョーク。
-
外部コンピュータに接続するためのパネルコンピュータまたはスイッチングモジュール。
パネルまたは外部コンピュータの助けを借りて、トロリーバスのトラクションモーターの診断が実行され、その動作パラメータが確認され、必要に応じて設定が変更されます マイクロプロセッサコントローラ… すべての動作パラメータとトラクションドライブの現在の状態が保存されます デジタル的に.
以下は制御システムのいくつかのモデルです。 漏れ電流の背後にある 適切な保護システム (ネットワークからの自動切断) を備えています。オプションで、ここに存在することもできます 移動時に消費され、停止時に回復するエネルギーのカウンター。
別途言及する価値があります トロリー保護電子機器、乗客の安全性を向上させるのに役立ちます。たとえば、トロリーバスは、乗客のドアが開いている場合、またはブレーキ システムに空気が入っていない場合は動きません。