単相誘導電動機の特徴
単相非同期モーターは、テクノロジーや日常生活で広く使用されています。数分の一ワットから数百ワットまでの単相非同期電気モーターの生産は、すべての低出力機械の生産の半分以上を占めており、その出力は絶えず増加しています。
単相モーターは通常、次の 2 つのカテゴリに分類されます。
-
汎用モーター « 産業用および家庭用電気モーターを含みます。
-
自動装置のモーター - 制御および非制御の AC モーターおよび特殊な低電力電気機械 (タコジェネレーター、ロータリー変圧器、セルシンなど)。
非同期電気モーターのかなりの部分は、単相 AC ネットワークで動作するように設計された汎用モーターです。ただし、単相ネットワークと三相ネットワークの両方で動作するように設計された汎用非同期電気モーターのかなり広範なグループが存在します。
ユニバーサルエンジンの設計は実質的に変わりません。 三相非同期機の伝統的な設計… 三相ネットワークで動作する場合、これらのモーターは三相モーターと同様の特性を持ちます。
単相モーターにはかご型回転子があり、固定子巻線はさまざまなバージョンで製造できます。ほとんどの場合、スロットの 3 分の 2 を埋める動作巻線と、スロットの残りの 3 分の 1 を埋める始動巻線が固定子に配置されます。運転コイルは連続運転用に計算され、始動コイルは始動期間のみ計算されます。したがって、小さな断面積のワイヤで作られ、かなりの数の巻き数が含まれています。始動トルクを生成するために、始動巻線には位相シフト要素 (抵抗器またはコンデンサー) が含まれています。
低電力の非同期モーターは、固定子に配置された動作巻線が 90 ° の角度で混合された 2 つの相を有する場合、2 相にすることができます。位相の 1 つには、位相シフト要素 (コンデンサまたは抵抗器 Top) が常に含まれており、コイル電流間に一定の位相シフトを提供します。
通常、相の 1 つにコンデンサが恒久的に接続されたモーターと呼ばれます。 コンデンサ… 移相コンデンサの静電容量は一定ですが、場合によっては、静電容量値が起動モードと実行モードで異なる場合があります。
単相非同期モーターの特徴は、ローターをさまざまな方向に回転できることです。回転方向はイニシャルトルクの方向によって決まります。
したがって、ロータ抵抗が低い (Ccr < 1) 場合、単相モーターは逆モードで動作できません。エンジン モードは、発電機モードが発生する高速でのローター回転数 0 <n <nc に対応します。
単相モーターの特性として、最大トルクはローターの抵抗に依存します。ローターのアクティブ抵抗が増加するにつれて、最大トルクは減少し、大きな抵抗値 Skr > 1 では、最大トルクは負になります。
機器や機構を駆動する電動機の種類を選ぶ際には、主にトルク特性(初期起動トルク、最大トルク、最小トルク)、回転周波数、振動音響特性などの特性を知る必要があります。場合によっては、エネルギーと重量の特性も必要となります。
例として、単相モーターの特性は次のパラメーターを使用して計算されます。
-
フェーズの数 — 1;
-
主電源周波数 — 50 Hz;
-
主電源電圧 - 220 V;
-
固定子巻線のアクティブ抵抗 — 5 オーム;
-
固定子巻線の誘導抵抗 — 9.42 オーム;
-
ローター巻線の誘導抵抗 — 5.6 オーム;
-
機械の軸方向の長さ - 0.1 m;
-
固定子巻線の巻き数 -320;
-
ステータ穴半径 — 0.0382 m;
-
チャンネル数 — 48;
-
エアギャップ — 1.0 x 103 m。
-
ローターのインダクタンス係数は 1.036。
単相巻線は固定子スロットの 3 分の 2 を占めます。
図では。単相電動機の電流と電磁スリップトルクの依存性を示す図である。理想的なアイドル モードでは、主に磁界を生成するためにネットワークによって消費されるモーター電流の値は比較的大きくなります。
シミュレートされたモーターの場合、励磁電流の大きさは初期電流の約 30% ですが、同じ電力の三相モーターの場合は 10 ~ 15% です。理想的なアイドルモードでの電磁モーメントは負の値を持ち、ローター回路の抵抗が増加するにつれて増加します。で 滑る C= 1、電磁モーメントはゼロであり、モデルが正しく動作していることが確認されます。
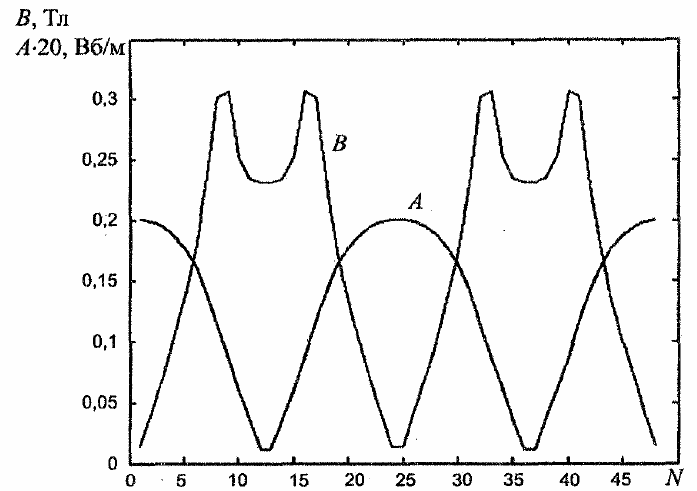
イチジク。 1. s = 1 の摺動時のモータギャップ内のベクトルポテンシャルと磁気誘導の包絡線
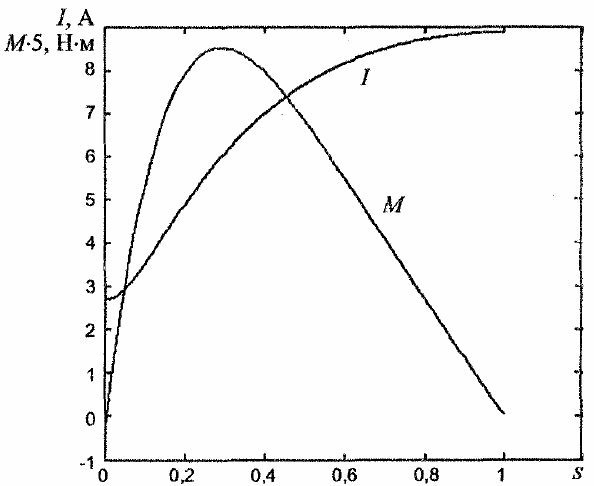
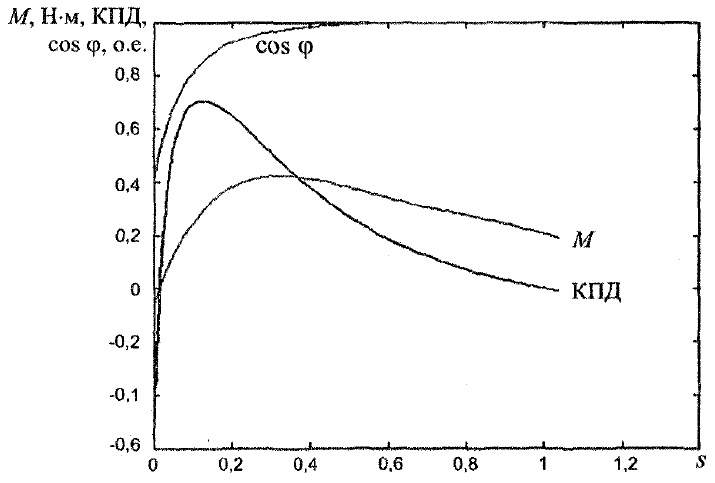
米。 2. 単相非同期モータの電流と電磁トルクの滑り依存性
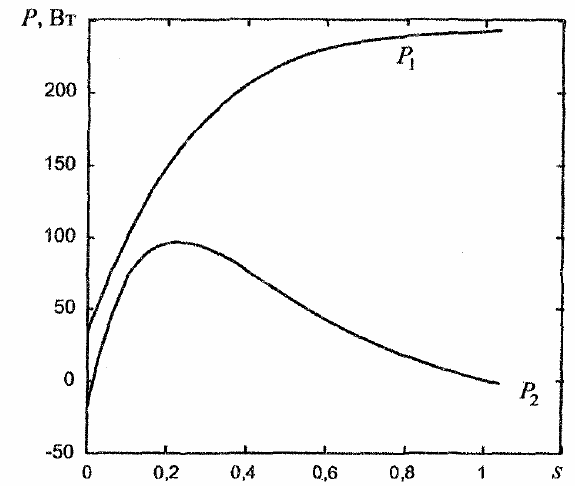
有効電力と消費電力のスリップ依存性 (図 3) には伝統的な特徴があります。理想的なアイドル モードでのエンジンの効率は、負のトルクに対応する負の符号を持ち、このモードの力率は非常に低くなります (シミュレートされたエンジンでは 0.125)。
三相モーターと比較して力率の値が低いのは、励磁電流の大きさによって説明されます。負荷が増加すると力率の値が増加し、三相モーターと同等の値になります(図4)。
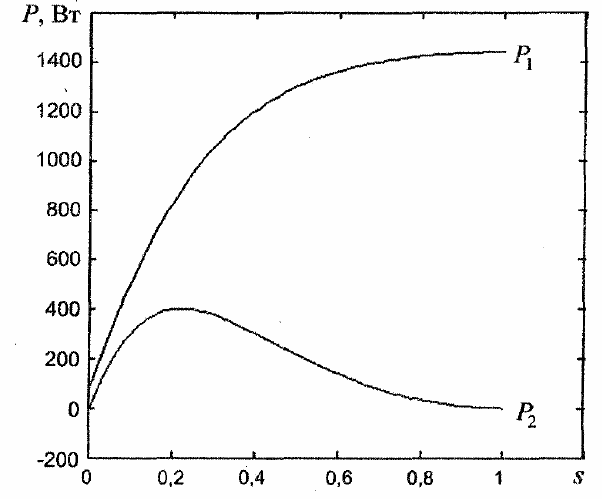
米。 3. 単相非同期モーターの有効電力と消費電力のスリップ依存性
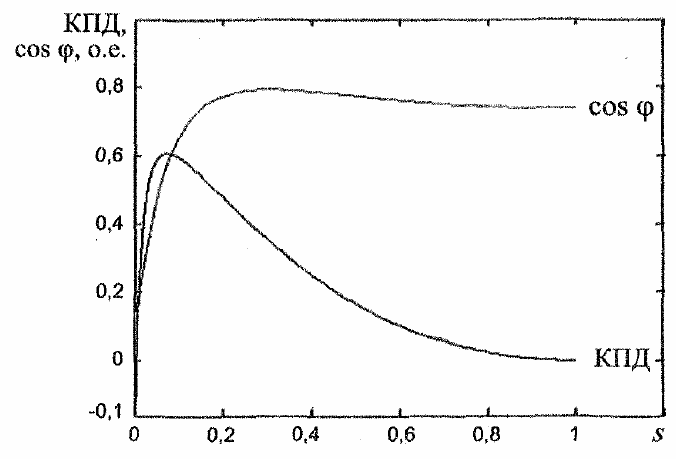
米。 4. 滑りに対する単相非同期モーターの有効作用係数と出力の依存性
ローターのアクティブ抵抗が増加するにつれて、電磁モーメントの大きさは減少し、1 を超える臨界滑りでは負になります。
図では。図5は、モータの二次媒体の導電率の異なる値に対する単相スリップモータの電磁モーメントの依存性を示す。
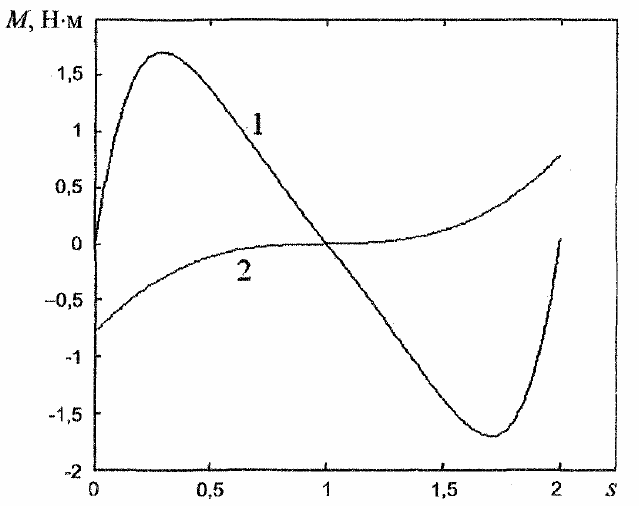
米。 5.異なる回転子抵抗における単相スリップモーターの電磁モーメントの依存性 (1 - 17 x 106 Cm / m、2 - 1.7 x 106 Cm / m)
コンデンサ モーターには、グリッドに恒久的に接続された 2 つの巻線があります。そのうちの 1 つはネットワークに直接接続され、2 つ目は必要な位相シフトを提供するコンデンサと直列に接続されます。
両方の巻線は固定子の同じ数のスロットを占有し、その巻数とコンデンサの静電容量は、ある程度の滑りを伴って円形の回転磁界が提供されるように計算されます。ほとんどの場合、名目伝票はそのまま受け入れられます。ただし、この場合、初期トルクは公称トルクよりも大幅に小さくなります。
初期モードの磁場は楕円形です。磁界の反動成分の影響が大きく、始動時に円形磁界が得られる条件からコンデンサの静電容量を大きくすると、トルクが低下し、公称スリップ時のエネルギー指標の減少。
円形磁場が公称モードよりも大きな大きさの滑りに対応する場合、第 3 の変形も可能です。しかし、トルクの増加には損失の大幅な増加が伴うため、この経路も最適ではありません。コンデンサモータの始動トルクの増加は、ロータのアクティブ抵抗を増加することによって実現できます。この方法ではスリップするたびに損失が増加し、その結果モーターの効率が低下します。
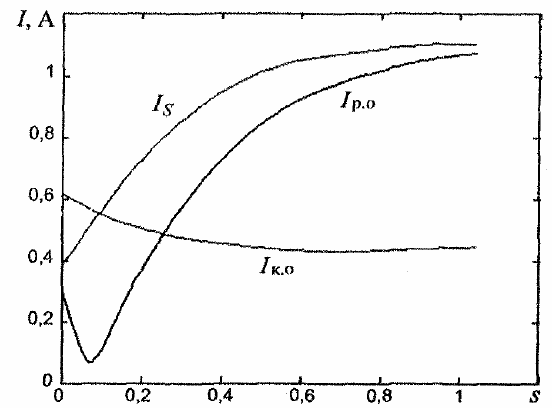
米。 6.スリップコンデンサモータ電流の依存性 (Azp.o — 動作コイル電流、Azk.o — コンデンサコイル電流、E — モータ電流)
米。 7. コンデンサの消費 P1 と有効 P2 スリップ電力の依存性
米。 8. スリップコンデンサモータの有効作用係数と電力および電磁モーメントの依存性
コンデンサ モータは、非常に満足のいくエネルギー性能、高い力率 (その値は三相モータの力率を上回ります)、増加した回転子の抵抗と大きな容量により、高い始動トルクを備えています。同時に、前述したように、エンジンの効率値も低下します。
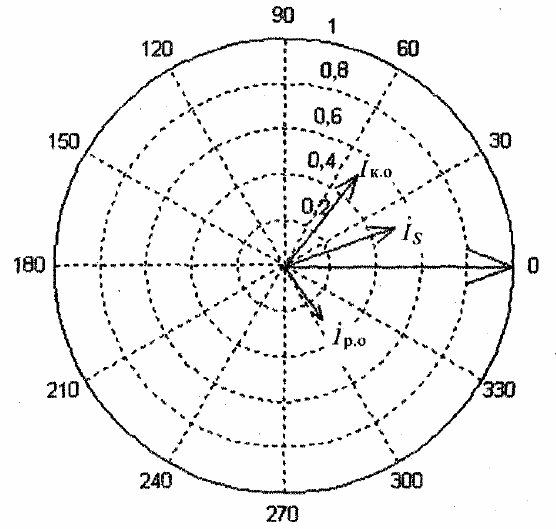
米。 9. スリップ s = 0.1 におけるコンデンサーモーターのベクトル図
ベクトル図 (図 9) は、選択したコンデンサ容量の値において、コンデンサ コイル電流がネットワーク電圧に対して進んでおり、動作コイル電流が遅れていることを示しています。この図は、公称値近くにスライドすると、モーターの磁界が楕円形になることも示しています。円形の磁場を得るには、2 つのコイルの電流の大きさが等しくなるようにコンデンサの静電容量値を下げる必要があります。
このトピックについては、以下も参照してください。多段速単相コンデンサーモーター