リバーシブル単相モーター
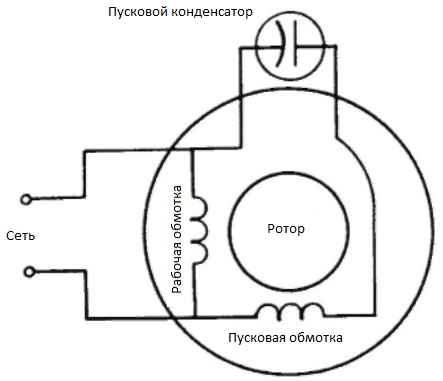
誘導モーターは単相モーターと呼ばれ、その固定子には動作巻線が 1 つだけあり、ネットワークの 1 つの相から直接電力が供給されます。単相モーターには補助 (始動) 巻線もあります。これはモーターの始動時にのみ使用され、ローターに初期衝撃を与えます。実際には、始動巻線はローターを始動するためにオンになります。そうしないと、補助なしでは動かなくなり、何らかの方法で押される必要があります。
他のモーターと同様に、単相モーターにも、回転するローターと、静止しているが時間的に変化する磁界を生成する役割を果たすだけのステーターがあります。作動巻線と始動巻線はステーター上で互いに直角に配置され、作動巻線は始動巻線の 2 倍のスロットを占有します。
このようなモーターは、始動時には二相として動作し、その後単相動作モードに切り替わると言えます。単相非同期モーターのローターは最も一般的な構造、つまりかご型 (かご型) または円筒型 (中空) です。
ステーターにスターター巻線がまったくなかったり、スターター巻線があっても使用されなかったりした場合はどうなるでしょうか。この場合、モーターがネットワークに接続されると、作動コイルに脈動磁場が発生し、ローターはそれを貫通する磁束の変化の条件下に置かれます。
しかし、ローターが最初は静止していて、作動コイルのみに突然交流を印加した場合、ローターはその場所から動かなくなります。これは、誘導起電力にもかかわらず、合計トルク (時計回りと反時計回り) がゼロになるためです。アンペールの突出力は互いに打ち消し合うため、回転する理由はありません。
それは完全に別の問題です。ローターが押されると、ローターは最初に押したのと同じ方向に回転し続けます。これは、電磁誘導の法則に従っているだけでなく、ローター内に EMF が誘導されるためです。したがって、電流が発生し、アンペアの法則に従って磁場によって反発されますが、(ローターがすでに回転しているため)結果として生じる押す方向のトルクは、押す方向に対するトルクよりも大きくなります。 。その結果、ローターは継続的に回転します。
始動時に始動巻線がローターを押すためには、始動巻線が作動巻線に対して空間的に変位するだけでなく、始動巻線の電流も作動巻線の電流に対して同位相にシフトする必要があります。これら 2 つの固定子巻線の組み合わせ動作は、脈動磁界だけでなく、すでに回転磁界と同等になります。そして、これはまさに、単相モーターの始動時にローターを加速するために必要なものです。
始動巻線の電流を位相シフトするには、通常、必要な静電容量のコンデンサが使用され、始動巻線と直列に接続され、90 度の位相シフトが作成されます。これは分相モーターの標準ソリューションです。
モーターがネットワークに接続されるとすぐに、オペレーターがスイッチボタンを押すと、コイル始動回路にエネルギーが供給され、速度がネットワークの指定された周波数での定格に対応する必要な値に達するとすぐに、ボタンが放されます。
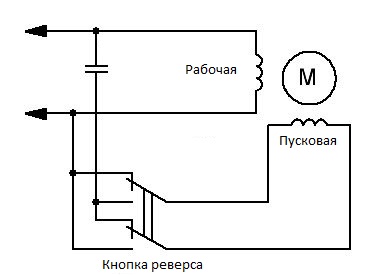
単相コンデンサ始動モータの逆転を実現するには、始動パルスが本来供給される方向と異なる方向に供給される条件を提供すれば十分です。これは、動作巻線と始動巻線の相回転の相対順序を変更することによって実現されます。
これらの条件を確保するには、動作コイルまたは始動コイルを切り替える必要があります。つまり、その端子のネットワークへの接続、またはネットワークとコンデンサへの接続の「極性」を変更する必要があります。単相モーターには、始動巻線と運転巻線のそれぞれの端が引き出される端子台があるため、これは簡単に実行できます。走行コイルは始動コイルよりもアクティブ抵抗が低いため、マルチメーターで簡単に見つけることができます。最良の解決策は、スターター コイルのワイヤを 2 極モーメンタリ スイッチに接続することです。