非接触磁気軸受:装置、機能、利点と欠点
磁気ベアリングまたは非接触サスペンションについて言えば、潤滑が不要、摩擦部品がないため摩擦損失がなく、極めて低い振動レベル、高い相対速度、低エネルギー消費、自動制御およびベアリング監視など、その優れた特性に注目することはできません。システム、シール能力。
これらすべての利点により、磁気ベアリングは、ガスタービン、極低温技術、高速発電機、真空装置、さまざまな金属切断機、および高精度および高速を含むその他の機器など、多くの用途にとって最適なソリューションとなっています。 (約 100,000 rpm )、機械的損失、外乱、エラーがないことが重要です。
基本的に、磁気軸受はパッシブ磁気軸受とアクティブ磁気軸受の 2 つのタイプに分類されます。受動磁気軸受の製造 永久磁石に基づく, しかし、このアプローチは理想から程遠いため、ほとんど使用されません。ワイヤー巻線内の交流によって磁界が生成されるアクティブベアリングを使用すると、より柔軟で幅広い技術的可能性が開かれます。
非接触磁気軸受の仕組み

アクティブ磁気サスペンションまたはベアリングの動作は、電磁浮上、つまり電界と磁界を使用した浮上の原理に基づいています。ここで、ベアリング内のシャフトの回転は、表面が互いに物理的に接触することなく発生します。このため、潤滑は完全に排除されており、機械的摩耗は依然として存在しません。これにより、マシンの信頼性と効率が向上します。
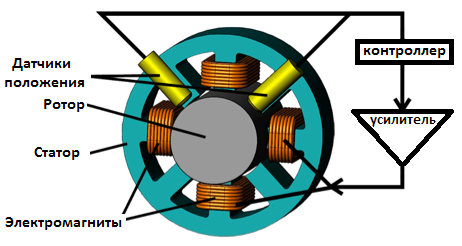
専門家はローターシャフトの位置を監視することの重要性にも注目しています。センサーシステムはシャフトの位置を継続的に監視し、ステーターの位置決め磁界を調整することで正確な位置決めを行うための信号を自動制御システムに送ります。シャフトの希望する側の吸引力は、電流を調整することによって強化または弱められます。アクティブベアリングの固定子巻線。
2 つのテーパー アクティブ ベアリング、または 2 つのラジアル アクティブ ベアリングと 1 つのアキシャル アクティブ ベアリングにより、ローターを文字通り空中に非接触で吊り下げることができます。ジンバル制御システムは継続的に動作し、デジタルまたはアナログにすることができます。これにより、高い保持強度、高い耐荷重、調整可能な剛性と衝撃吸収が実現します。この技術により、ベアリングは低温および高温、真空、高速、無菌性の要件が高まる条件で動作することが可能になります。
アクティブ非接触磁気軸受装置
上記から、アクティブ磁気サスペンション システムの主要部分は、磁気ベアリングと自動電子制御システムであることが明らかです。電磁石は常にさまざまな側からローターに作用し、その動作は電子制御システムに従属します。

ラジアル磁気軸受ロータには強磁性プレートが装備されており、ステータ巻線からの保持磁界の影響を受けるため、ロータはステータに触れることなくステータの中心に吊り下げられ、誘導センサがステータの位置を監視します。ローターは常に。正しい位置からの偏差があると、ローターを希望の位置に戻す信号がコントローラーに送信されます。半径方向のクリアランスは 0.5 ~ 1 mm にすることができます。
磁気サポートベアリングも同様に機能します。トラクションディスクシャフトにはリング状の電磁石が取り付けられています。電磁石はステーター上にあります。軸センサーはシャフトの端にあります。
機械の停止時や保持機構の故障時にロータを確実に保持するために、シャフトとの隙間が磁気軸受の1/2になるように固定されたセーフティボールベアリングを使用しています。 。
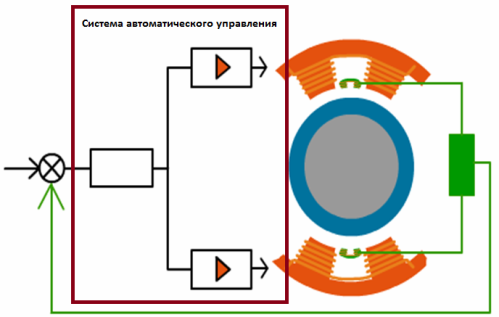
自動制御システムはキャビネット内に配置されており、ローター位置センサーからの信号に従って電磁石を流れる電流を正しく調整します。アンプの出力は、電磁石の最大強度、エアギャップのサイズ、ローターの位置の変化に対するシステムの反応時間に関係します。
非接触磁気軸受の可能性
ラジアル磁気ベアリングで可能な最大ローター速度は、強磁性ローター プレートの遠心力に対する抵抗力によってのみ制限されます。通常、周速度の限界は 200 m/s ですが、アキシアル磁気軸受の場合、限界はストップの鋳鋼の抵抗によって制限されます (通常の材料では 350 m/s)。
適用される強磁性体は、対応するベアリング ステータの直径と長さによってベアリングが耐えられる最大荷重も決定します。標準材質の場合、最大圧力は0.9N/cm2と従来の接触軸受に比べて低くなりますが、軸径を大きくすることで周速を速くすることで荷重損失を補うことができます。
アクティブ磁気ベアリングの消費電力はそれほど高くありません。ベアリングにおける最大の損失は渦電流によるものですが、これは機械で従来のベアリングを使用した場合に失われるエネルギーに比べて 10 分の 1 です。カップリング、熱バリア、その他のデバイスを除くと、ベアリングは真空、ヘリウム、酸素、海水などの環境で効果的に機能します。温度範囲は-253℃~+450℃です。
磁気軸受の相対的な欠点
一方、磁気軸受にも欠点があります。
まず第一に、最大 2 回の故障に耐えることができる補助安全転がり軸受を使用する必要があり、その後は新しいものと交換する必要があります。
第二に、自動制御システムが複雑であり、故障した場合には複雑な修理が必要になります。
第三に、大電流ではベアリングの固定子巻線の温度が上昇します。巻線が加熱するため、独自の冷却、できれば液体冷却が必要です。
最後に、十分な磁力をサポートするにはベアリング表面を大きくする必要があるため、非接触ベアリングの材料消費量が多くなります。ベアリングのステータ コアは大きくて重いからです。さらに磁気飽和現象も発生します。

しかし、明らかな欠点にもかかわらず、磁気ベアリングは現在、高精度の光学システムやレーザー設備などで広く使用されています。前世紀半ば以来、何らかの形で磁気軸受は常に改良されてきました。