発電機の並列運転
 発電所では、常に複数のターボまたは油圧ユニットが設置されており、発電機またはサージの共通バスバー上で並行して連携して動作します。
発電所では、常に複数のターボまたは油圧ユニットが設置されており、発電機またはサージの共通バスバー上で並行して連携して動作します。
その結果、発電所での電力生産は複数の発電機が並行して動作することによって行われ、この協力には多くの貴重な利点があります。
発電機の並列運転:
1. 発電所および変電所の機器の運用の柔軟性が向上し、必要最小限の予備で発電機、主要機器および対応する配電装置の予防保守が容易になります。
2. ユニット間で毎日の負荷スケジュールを最も効率的に分散できるため、発電所の運用効率が向上し、それによって電力の最適な使用が実現され、効率が向上します。水力発電所では、洪水期や夏期と冬期の減水期に水流の力を最大限に利用することが可能になります。
3.発電所と消費者への電力供給の信頼性と中断のない動作が向上します。

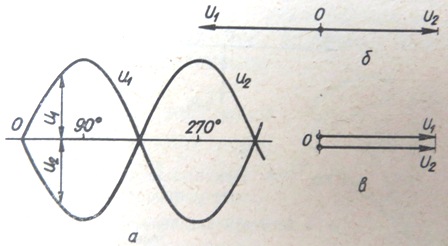
米。 1. 発電機の並列運転の概念図
生産量を増やし、配電を改善するために、多くの発電所を組み合わせて並列運転し、強力な電力システムを形成します。
通常の動作では、発電機は共通バス (発電機または過電圧) に接続され、同期して回転します。ローターは同じ電気角速度で回転します

並列運転では、2 つの発電機の端子の瞬間電圧は大きさが等しく、符号が逆でなければなりません。
発電機を別の発電機(またはネットワーク)と並列運転用に接続するには、発電機を同期させる必要があります。つまり、動作中の発電機に応じて、接続された発電機の回転速度と励磁速度を調整する必要があります。
並列に接続されて動作する発電機は同相である必要があります。つまり、同じ順序の位相回転を持っている必要があります。
図からわかるように。図1に示すように、並列動作では、発電機は相互に接続されている。すなわち、スイッチ上のそれらの電圧U1とU2は正反対になる。負荷に関しては、発電機は電圧 U1 と U2 に従って動作します。発電機の並列運転のこれらの条件は、図 1 の図に反映されています。 2.
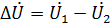
米。 2. 並列運転のために発電機をオンにする条件。発電機の電圧は大きさが等しく、位相が逆です。
ジェネレータの同期には、精密同期と粗同期または自己同期の 2 つの方法があります。
ジェネレーターの正確な同期のための条件。
正確な同期により、励起された発電機は、同期条件(電圧の瞬時値が等しいU1 = U2)に達すると、スイッチB(図1)を介してネットワーク(バス)に接続されます。
発電機が別々に動作する場合、それらの瞬時相電圧はそれぞれ等しくなります。


これは、発電機の並列接続に必要な条件を意味します。発電機をオンにして実行するには、次のものが必要です。
1. 実効電圧値の等しいU1 = U2
2. 角周波数の等しい ω1 = ω2 または f1 = f2
3. 同相の電圧のマッチング ψ1 = ψ2 または Θ = ψ1 -ψ2 = 0。
これらの要件が正確に満たされると、発電機のスイッチを入れた瞬間に固定子均等化電流がゼロになるという特徴を持つ理想的な状態が生まれます。ただし、正確な同期の条件を満たすには、発電機の電圧、周波数、位相角の比較値を慎重に調整する必要があることに注意してください。
この点で、同期の理想的な条件を完全に満たすことは事実上不可能です。多少の誤差はありますが、ほぼ正確に実行されます。上記の条件のいずれかが満たされない場合、U2 のとき、開いている通信スイッチ B の端子に電圧差が作用します。
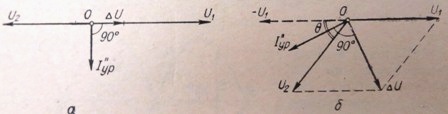
米。 3. 正確な同期条件から逸脱した場合のベクトル図: a — 発電機の動作電圧が等しくない。 b — 角周波数が等しくありません。
スイッチがオンになると、回路内のこの電位差の作用により、均等化電流が流れ、その初期瞬間の周期成分は次のようになります。
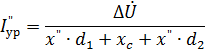
図 (図 3) に示されている正確な同期条件から逸脱する 2 つのケースを考えてみましょう。
1. 発電機 U1 と U2 の動作電圧が等しくなく、他の条件が満たされている。
2. 発電機は同じ電圧を持っていますが、異なる速度で回転します。つまり、それらの角周波数 ω1 と ω2 は等しくなく、電圧間に位相の不一致があります。
図の図からわかるように。 3、a、電圧U1とU2の実効値の不平等により、発電機と接続線のアクティブ抵抗が存在するため、ほぼ純粋に誘導性となる等化電流I”urが発生します。ネットワークは非常に小さいため無視されます。この電流により有効電力サージが発生しないため、発電機やタービン部品に機械的ストレスが発生しません。この点において、並列運転のために発電機のスイッチが入っている場合、電圧の差は最大5〜10%、緊急の場合は最大20%まで許容されます。
電圧実効値 U1 = U2 が等しいが、角周波数が異なる場合、Δω = ω1 — ω2 ≠ 0 または Δf = f1 — f2 ≠ 0、発電機とネットワーク (または 2 番目の発電機) の電圧ベクトル) は、時間の経過とともに変化する特定の角度 Θ でシフトされます。この場合、発電機U1とU2の電圧は、180°の角度ではなく、180°の角度-Θだけ位相が異なります(図3、b)。
開いたスイッチ B の端子、つまり点 a と点 b の間には、電圧差 ΔU が作用します。前の場合と同様に、電圧の存在は電球を使用して検出でき、この電圧の実効値は点 a と b の間に接続された電圧計で測定できます。
スイッチ B が閉じている場合、電圧差 ΔU の作用により、均等化電流 I が発生します。これは、U2 に関してほぼ純粋にアクティブになり、発電機が並列でオンになると、ショックや機械的損傷を引き起こします。発電機やタービンのシャフトやその他の部品の応力。
ω1 ≠ ω2 で、滑りが s0 <0, l% で角度 Θ ≥ 10 ° であれば、同期は完全に満足です。
タービンレギュレータの慣性のため、角周波数 ω1 = ω2 と、発電機の固定子巻線と回転子巻線の相対位置を特徴付ける電圧ベクトル間の角度 Θ を長期的に等しくすることは不可能です。一定のままではなく、継続的に変化します。その瞬時値は Θ = Δωt となります。
ベクトル図 (図 4) では、最後の状況は、電圧ベクトル U1 と U2 の間の位相角が変化すると、ΔU も変化するという事実で表されます。このときの電圧差ΔUを衝撃電圧と呼ぶ。
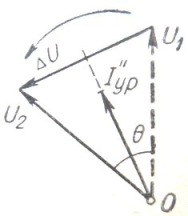
米。 4. 周波数の不平等による発電機の同期のベクトル図。
クロック電圧の瞬時値Δuは、発電機の電圧u1とu2の瞬時値の差です(図5)。
実効値 U1 = U2 が等しいと仮定すると、基準時間の位相角 ψ1 と ψ2 も等しくなります。
そうすれば、次のように書くことができます

衝撃応力曲線を図に示します。 5.
リズム電圧は、比較された周波数の合計の半分に等しい周波数と、位相角 Θ に応じて時間とともに変化する振幅で調和的に変化します。
図のベクトル図より。図 4 から、角度 Θ の特定の指定値について、衝撃応力の実効値を求めることができます。
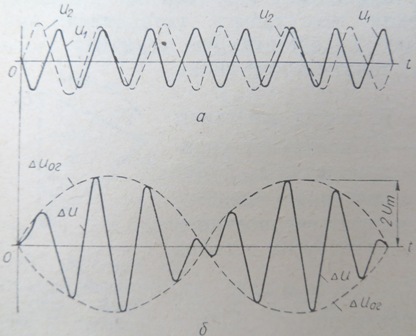
米。 5. ストレスを克服する曲線。
時間の経過に伴う角度 Θ の変化を考慮すると、衝撃応力振幅の観点からシェルの式を書くことができます。これにより、時間の経過に伴う応力振幅の変化が得られます (図 5、b の点線の曲線)。 ):

図のベクトル図からわかるように、図 4 と最後の式から、衝撃応力振幅 ΔU は 0 から 2 Um まで変化します。 ΔU の最大値は、電圧ベクトル U1 と U2 (図 4) の位相と角度 Θ = π が一致する瞬間であり、最小値は、これらの電圧の位相が 180 °異なり、角度 Θ = 0 の場合です。リズムカーブの周期は次のようになります。
発電機が強力なシステムと並列運転するように接続されている場合、システムの xc の値は小さく無視できます (xc ≈ 0)。
そして突入電流
電流 Θ = π で望ましくないスイッチオンの場合、スイッチオンされた発電機の固定子巻線のサージ電流は、発電機端子の三相短絡のサージ電圧の 2 倍に達する可能性があります。
図のベクトル図からわかるように、均等化電流の有効成分は次のようになります。 4は次と等しい
