周波数によるポンプユニットの電気駆動
 遠心ポンプの動作モードは、ホイールの回転速度を変更することで調整するのが最もエネルギー効率が高くなります。調整可能な電気駆動装置を駆動モーターとして使用すると、車輪の回転速度を変更できます。
遠心ポンプの動作モードは、ホイールの回転速度を変更することで調整するのが最もエネルギー効率が高くなります。調整可能な電気駆動装置を駆動モーターとして使用すると、車輪の回転速度を変更できます。
ガスタービンと内燃エンジンの設計と特性は、必要な範囲内で回転速度を変化させることができるように設計されています。
各機構の回転速度を調整するプロセスは、デバイスの機械的特性を使用して簡単に分析できます。
ポンプと電動モーターから構成されるポンプユニットの機械的特性を考えてみましょう。図では。図1は、逆止弁を備えた遠心ポンプ(曲線1)およびかご形ロータを備えた電気モータ(曲線2)の機械的特性を示す。
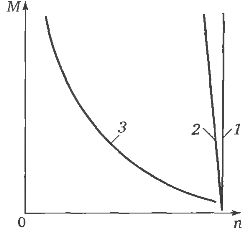
米。 1. ポンプユニットの機械的特性
電動モーターのトルク値とポンプの抵抗トルクの差を動トルクといいます。モーターのトルクがポンプの抵抗モーメントより大きい場合、動的トルクは正とみなされ、小さい場合は負と見なされます。
正の動的モーメントの影響下で、ポンプユニットは加速して動作し始めます。加速します。動トルクが負の場合、ポンプユニットは遅れて動作します。が遅くなります。
これらのモーメントが等しい場合、定常動作モードが発生します。ポンプユニットは一定速度で動作します。この速度とそれに対応するトルクは、電動モーターとポンプの機械的特性の交点(図1の点a)によって決まります。
何らかの方法で調整する過程で、たとえば電気モーターの回転子回路に追加の抵抗を導入することによって機械的特性が柔らかくなった場合 (図 1 の曲線 3)、電気モーターのトルク抵抗の瞬間が小さくなります。
負の動的トルクの影響下で、ポンプユニットは遅れて動作し始めます。トルクと抵抗モーメントが再び釣り合うまで減速します (図 1 の点 b)。この点は速度とトルクの固有値に対応します。
したがって、ポンプユニットの回転速度を制御するプロセスには、電気モーターのトルクとポンプの抵抗モーメントの変化が常に伴います。
ポンプ速度の制御は、ポンプにしっかりと接続されている電気モーターの速度を変更することによって、またはポンプと電気モーターを接続している一定速度で動作するトランスミッションのギア比を変更することによって行うことができます。

電気モーターの回転速度の調整
ACモーターは主にポンプユニットに使用されます。 AC モーターの回転速度は、供給電流の周波数 f、極対の数 p、および滑り s に依存します。これらのパラメータの 1 つまたは複数を変更することで、電気モーターとそれに接続されているポンプの速度を変更できます。
周波数電気駆動の主な要素は次のとおりです。 周波数変換器… インバータには、変数 e2 に変換された一定のグリッド周波数 f1 があります。周波数 e2 に比例して、コンバータの出力に接続された電気モーターの速度が変化します。
周波数変換器を使用すると、主電源電圧 U1 と周波数は、制御システムに必要な変数パラメータ U2 および e2 に変換される f1 を実質的に変更しません。電気モーターの安定した動作を確保し、電流と磁束の点で過負荷を制限し、周波数変換器の高エネルギー指標を維持するには、周波数変換器のタイプに応じて入力パラメーターと出力パラメーターの間の特定の比率を維持する必要があります。メカニカルポンプの特性。これらの関係は、周波数制御則の方程式から導出されます。
ポンプの場合、次の比率に従う必要があります。
U1 / f1 = U2 / f2 = 定数
図では。図2は、周波数調整を伴う誘導電動機の機械的特性を示している。周波数 f2 が低下すると、機械的特性は n - M 座標内での位置が変化するだけでなく、その形状もある程度変化します。特に電動機の最大トルクが低下する。これは、比率が U1 / f1 = U2 / f2 = const であることと、周波数 f1 の変化がモーター トルクの大きさに対するステーターのアクティブ抵抗の影響を考慮していないためです。

米。 2. 最大周波数 (1) および低減周波数 (2) における周波数電気ドライブの機械的特性
この影響を考慮して周波数を調整すると、最大トルクは変化せず、機械的特性の形状は維持され、その位置のみが変化します。
周波数変換器 パルス幅変調 (PWM) 正弦波に近い電流および電圧曲線の形状がコンバータの出力で提供されるという事実により、高いエネルギー特性を備えています。最近では、IGBT モジュール (絶縁ゲート バイポーラ トランジスタ) をベースとした周波数コンバータが最も普及しています。
IGBT モジュールは高効率の重要な要素です。低電圧降下、高速、低スイッチング電力が特徴です。非同期モーターを制御するための PWM およびベクトル アルゴリズムを備えた IGBT モジュールに基づく周波数コンバーターには、他のタイプのコンバーターに比べて利点があります。出力周波数範囲全体にわたって高い力率を持っています。
コンバータの概略図を図に示します。 3.
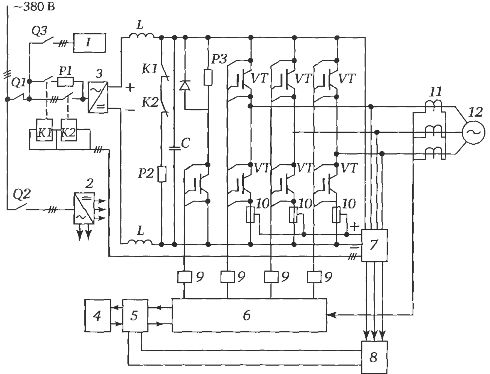
米。 3.IGBT モジュールの周波数コンバータのスキーム: 1 — ファンのブロック。 2 — 電源; 3 — 制御されていない整流器。 4 - コントロールパネル。 5 - 制御パネルボード。 6 — PWM; 7 - 電圧変換ユニット。 8 — システム制御ボード。 9 - ドライバー。 10 — インバータユニット用のヒューズ。 11 - 電流センサー。 12 — 非同期かご型モーター。 Q1、Q2、Q3 — 電源回路、制御回路、ファンユニット用のスイッチ。 K1、K2 — コンデンサと電源回路を充電するためのコンタクタ。 C — コンデンサバンク。 R1、R2、R3 — コンデンサの充電、コンデンサの放電、およびドレインブロックの電流を制限するための抵抗。 VT - インバータ電源スイッチ (IGBT モジュール)
周波数コンバータの出力では、正弦波とはわずかに異なる、高調波成分を含む電圧 (電流) 曲線が形成されます。それらの存在は、電気モーターの損失の増加につながります。このため、電気駆動装置が定格速度に近い速度で動作すると、電気モーターに過負荷がかかります。
低速で動作すると、ポンプ駆動装置に使用される自己換気型電気モーターの冷却条件が悪化します。ポンプユニットの通常の制御範囲(1:2または1:3)では、この換気条件の悪化は、流量とポンプヘッドの減少による負荷の大幅な減少によって補われます。
公称値 (50 Hz) に近い周波数で動作する場合、高次高調波の発生と組み合わせた冷却条件の悪化により、許容機械動力を 8 ~ 15% 削減する必要があります。このため、電気モーターの最大トルクは 1 ~ 2%、効率は 1 ~ 4%、cosφ は 5 ~ 7% 減少します。
電気モーターの過負荷を回避するには、速度の上限値を制限するか、より強力な電気モーターをドライブに装備する必要があります。ポンプユニットが周波数 e2 > 50 Hz で動作するように設計されている場合、最後の対策は必須です。エンジン回転数の上限値の制限は、周波数 e2 を 48 Hz に制限することで行われます。駆動モーターの定格出力の増加分は基準値未満を四捨五入して記載しています。

可変電気ブロックドライブのグループ制御
多くのポンプ セットは複数のブロックで構成されています。一般に、すべてのユニットに調整可能な電気ドライブが装備されているわけではありません。 2 台または 3 台の設置済みユニットのうち、1 台に調整可能な電気駆動装置を装備するだけで十分です。コンバータがいずれかのユニットに常時接続されている場合、可変速ドライブを備えたユニットは長時間使用されるため、モータ リソースの消費が不均一になります。
ステーションに設置されたすべてのブロック間で負荷を均一に分散するために、ブロックをコンバータに直列に接続できるグループ制御ステーションが開発されました。コントロール ステーションは通常、低電圧ユニット (380 V) 用に製造されています。
通常、低電圧制御ステーションは 2 台または 3 台のユニットを制御するように設計されています。低圧制御ステーションには、相間短絡や地絡を保護するサーキットブレーカー、過負荷から機器を保護するサーマルリレー、および制御機器(スイッチ、 ボタンポスト その他。)。
制御ステーションのスイッチング回路には、周波数変換器を選択したブロックに接続し、ポンプまたは送風ユニットの技術的な動作モードを妨げることなく動作ブロックを交換できるようにする必要なインターロックが含まれています。
コントロールステーションには、通常、パワーエレメント(自動スイッチ、コンタクタなど)とともに、制御および調整装置(マイクロプロセッサコントローラなど)が含まれています。
顧客の要望に応じて、ステーションにはバックアップ電源(ATS)の自動スイッチング、消費電力の商用測定、停止装置の制御のための装置が装備されています。
必要に応じて、追加のデバイスが制御ステーションに導入され、周波数変換器とともにユニットのソフトスターターが確実に使用されるようになります。
自動制御ステーションは以下を提供します。
-
技術パラメータ(圧力、レベル、温度など)の設定値を維持する。
-
規制および非規制ユニットの電気モーターの動作モードの制御(消費電流、電力の制御)およびその保護。
-
メインデバイスに障害が発生した場合のバックアップデバイスの自動起動。
-
周波数変換器に障害が発生した場合、ブロックをネットワークに直接切り替える。
-
バックアップ (ATS) 電気入力の自動スイッチング。
-
電源ネットワークの喪失および深い電圧低下後のステーションの自動再接続 (AR)。
-
所定の時間に作業ユニットを停止および開始するステーションの動作モードの自動変更。
-
制御されたユニットが公称速度に達しても必要な水の供給を提供しなかった場合、追加の非制御ユニットが自動的に作動します。
-
モーターリソースの均一な消費を保証するために、一定の間隔で作業ブロックを自動的に交互に切り替えます。
-
制御盤または制御盤からポンピング(ブロー)ユニットの動作モードの動作制御。
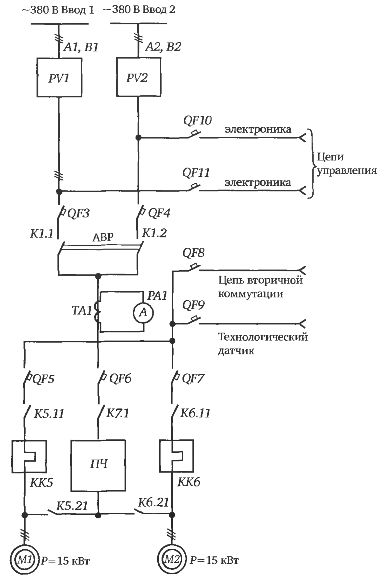
米。 4. 可変周波数ポンプの電気駆動装置のグループ制御用ステーション
ポンプユニットでの可変周波数の使用効率
可変周波数ドライブを使用すると、低流量で大型のポンプユニットを使用できるため、エネルギーを大幅に節約できます。このおかげで、ユニットのユニット容量を増やすことで、ユニットの総数を減らし、それに応じて建物の全体の寸法を減らし、ステーションの水力スキームを簡素化し、パイプラインの数を減らすことができます。バルブ。
したがって、ポンプユニットで調整可能な電気駆動装置を使用すると、電力と水を節約するとともに、ポンプユニットの数を減らし、ステーションの油圧回路を簡素化し、ポンプ場の建物の建設容積を減らすことができます。これに関連して、二次的な経済効果が生じます。建物の暖房、照明、修繕にかかるコストが削減され、駅の目的やその他の特定の条件に応じて、削減されたコストは 20 ~ 50% 削減されます。
周波数変換器の技術文書には、ポンプユニットで調整可能な電気駆動装置を使用すると、上水と廃水の汲み上げに費やされるエネルギーを最大 50% 節約でき、回収期間は 3 ~ 9 か月であることが示されています。
同時に、ポンプユニットの動作における制御された電気駆動の有効性の計算と分析により、最大75 kWの出力を持つユニットを備えた小型ポンプユニットの場合、特に大きな静圧コンポーネントで動作する場合に、制御された電気ドライブの使用には適していません。このような場合、スロットリングを使用して動作するポンプ ユニットの数を変更することで、よりシンプルな制御システムを使用できます。
ポンプユニットの自動化システムで可変電気駆動装置を使用すると、一方ではエネルギー消費が削減されますが、他方では追加の資本コストが必要となるため、ポンプユニットで可変電気駆動装置を使用する可能性は、削減されたコストを比較することによって決定されます。基本と新規の 2 つのオプションがあります。調整可能な電気駆動装置を備えたポンプユニットを新しいオプションとして採用し、ユニットが一定速度で動作するユニットをメインオプションとして採用します。