サイリスタ電気駆動装置
 産業界では、制御された半導体バルブ (サイリスタ) を備えたアクチュエータが広く使用されています。サイリスタは、最大数百アンペアの電流、最大 1000 ボルト以上の電圧向けに製造されています。これらは、高効率、比較的小型、高速、および幅広い周囲温度 (-60 ~ +60 °C) で動作する能力によって区別されます。
産業界では、制御された半導体バルブ (サイリスタ) を備えたアクチュエータが広く使用されています。サイリスタは、最大数百アンペアの電流、最大 1000 ボルト以上の電圧向けに製造されています。これらは、高効率、比較的小型、高速、および幅広い周囲温度 (-60 ~ +60 °C) で動作する能力によって区別されます。
サイリスタは完全に制御可能なデバイスではなく、制御電極に対応する電位を印加することでオンになり、遮断電圧による電流回路の強制遮断、ゼロを通る自然な遷移、またはダンピングの供給によってのみオフになります。反対の符号の電圧。制御電圧の供給タイミング(遅延)を変更することで、整流電圧の平均値を調整し、モーターの速度を調整することができます。
レギュレーションがない場合の整流電圧の平均値は、主にサイリスタ コンバータのスイッチング回路によって決まります。トランスデューサ回路は、ゼロプルとブリッジの 2 つのクラスに分類されます。
中電力および高電力の設備では、主にブリッジ コンバータ回路が使用されます。これには主に次の 2 つの理由があります。
-
各サイリスタの電圧が低下し、
-
変圧器の巻線を流れる定電流成分が存在しないこと。
コンバータ回路のフェーズ数も異なります。低電力設備の 1 フェーズから、強力なコンバータの 12 ~ 24 フェーズまであります。
サイリスタ コンバータのすべてのバリエーションには、低慣性、回転要素の欠如、サイズの小型化(電気機械コンバータと比較して)などのプラスの特性とともに、多くの欠点があります。
1. ネットワークへのハード接続: ネットワーク内のすべての電圧変動が駆動システムに直接伝達され、負荷が増加すると、モーター軸が直ちにネットワークに転送され、電流ショックが発生します。
2. 電圧降下調整時の力率が低い。
3. 高調波の発生、電力網への負荷。
サイリスタコンバータで駆動されるモータの機械的特性は、電機子にかかる電圧と負荷による変化の性質、つまりコンバータの外部特性とコンバータとモータのパラメータによって決まります。
サイリスタの装置と動作原理
サイリスタ (図 1、a) は、2 つの pn 接合と 1 つの n-p 接合を備えた 4 層シリコン半導体です。アノード電圧Uaの作用下でサイリスタを流れる電流Azの大きさは、制御電圧Uyの作用下で制御電極を流れる制御中に流れる電流Azに依存する。
制御電流がない場合(Azy = 0)、電圧Uが増加するにつれて、ユーザーPの回路内の電流Aは増加しますが、非常に小さな値のままです(図1、b)。

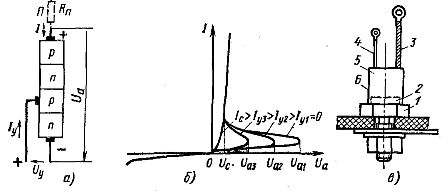
米。 1. サイリスタのブロック図(a)、電流電圧特性(b)、構造(c)
このとき、非導通方向にオンしたn-p接合は抵抗が高くなります。開放電圧、点火電圧、またはスイッチング電圧と呼ばれるアノード電圧の特定の値 Ua1 で、ブロッキング層のアバランシェ降伏が発生し、その抵抗が小さくなり、電流の強さが抵抗 Rp によってオームの法則に従って決定される値まで増加します。ユーザーPの
電流 Iу が増加すると、電圧 Ua は減少します。電圧Uaが最低値となる電流Iuを補正して電流Iと呼ぶ。
サイリスタは、電圧 Ua が除去されるか、その符号が変化すると閉じます。サイリスタの定格電流 I は、許容できない過熱を引き起こさない順方向に流れる電流の最大平均値です。
公称電圧 Un は、デバイスの所定の信頼性が保証される最大許容振幅電圧と呼ばれます。
公称電流によって生じる電圧降下 ΔUn を公称電圧降下と呼びます (通常、ΔUn = 1 — 2 V)。
補正の電流強度 Ic の値は、電圧 Uc 6 ~ 8 V で 0.1 ~ 0.4 A の範囲内で変動します。
サイリスタは 20 ~ 30 μs のパルス幅で確実に開きます。パルス間の間隔は 100 μs 未満であってはなりません。電圧 Ua がゼロに低下すると、サイリスタがオフになります。
サイリスタの外観デザインを図に示します。1、v… 銅ベース 1 16 番目のシリコン 4 層構造 2 ネジ付きテール、負の電力 3 および 4 つの出力の制御付き。シリコン構造は円筒形の金属ハウジング 5 によって保護されています。絶縁体はハウジング 6 に固定されています。ベース 1 のネジは、サイリスタを取り付け、アノード電圧源を正極に接続するために使用されます。
電圧 Ua が増加すると、サイリスタを開くのに必要な制御電流が減少します (図 1、b を参照)。制御開放電流は制御開放電圧uyoに比例します。
Uа が正弦波の法則に従って変化すると (図 2)、必要な電圧と 0 の開度は点線で表すことができます。印加された制御電圧 Uy1 が一定で、その値が電圧 uuo の最小値を下回る場合、サイリスタは開きません。
制御電圧が値 Uy2 まで増加すると、電圧 Uy2 が電圧 uyo より大きくなるとすぐにサイリスタが開きます。 uуの値を変更することでサイリスタの開き角を0~90°の範囲で変更できます。
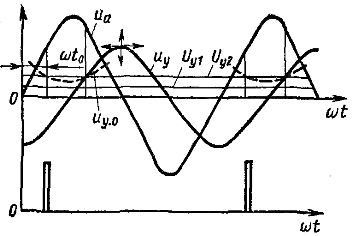
米。 2. サイリスタ制御
90°を超える角度でサイリスタを開くには、たとえば正弦波状に変化する可変制御電圧 uy が使用されます。この電圧の正弦波と点線 uuo = f (ωt) の交点に対応する電圧で、チリスタが開きます。
正弦波 uyo を左右に水平に動かすことで、サイリスタの開き角度 ωt0 を変えることができます。この開き角度制御を水平と呼びます。これは特別な位相スイッチを使用して実行されます。
同じ正弦波を垂直に上下に動かすことで、開き角度を変えることもできます。このような管理を垂直的管理と呼びます。この場合、可変電圧制御 tyy を使用して、定電圧を代数的に追加します。たとえば、電圧 Uy1... この電圧の大きさを変更することで開き角を調整します。
サイリスタは一度開くと、正の半サイクルが終了するまで開いたままとなり、制御電圧はその動作に影響を与えません。これにより、適切なタイミングで正の制御電圧パルスを周期的に印加することでパルス制御を適用することも可能になります(図2下)。これにより、コントロールの明瞭さが向上します。
何らかの方法でサイリスタの開き角度を変更することにより、さまざまな形状の電圧パルスをユーザーに印加できます。これにより、ユーザーの端末の平均電圧の値が変化します。
サイリスタを制御するにはさまざまなデバイスが使用されます。図に示すスキームでは。図3に示すように、AC幹線電圧が変圧器Tp1の一次巻線に印加される。
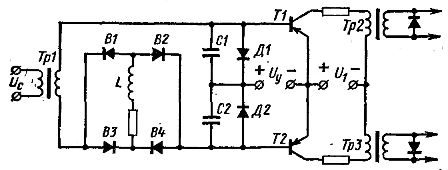
米。 3. サイリスタ制御回路
全波整流器 B は、この変圧器の 2 次回路に含まれています。1、B2、B3、B4 は、DC 回路に大きなインダクタンス L を持ちます。実質的な波流は実質的に排除されます。しかし、このような直流電流は、図に示すような形の交流電流を全波整流することによってのみ得られます。 4、a.
したがって、この場合、整流器B1、B2、B3、B4(図3を参照)は交流の形態のコンバータである。この方式では、コンデンサ C1 と C2 が交互に方形電流パルスと直列になります (図 4、a)。この場合、コンデンサC1およびC2(図4、b)のプレート上に横のこぎり波電圧が形成され、トランジスタT1およびT2のベースに印加されます(図3を参照)。
この電圧を基準電圧と呼びます。直流電圧Uyは各トランジスタの主回路にも作用する。のこぎり電圧がゼロの場合、電圧 Uy により両方のトランジスタのベースに正の電位が生成されます。各トランジスタは、負のベース電位でベース電流によって開きます。
これは、ソー基準電圧の負の値が Uy より大きいことが判明した場合に発生します (図 4、b)。この条件は、位相角のさまざまな値での Uy の値に応じて満たされます。この場合、トランジスタは、電圧 Uy の大きさに応じて、異なる期間開きます。
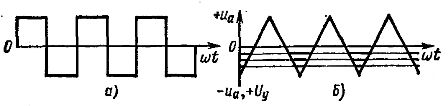
米。 4. サイリスタ制御電圧の図
どちらかのトランジスタが開くと、変圧器 Tr2 または Tr3 の一次巻線に方形電流パルスが流れます (図 3 を参照)。このパルスの前縁が通過すると、二次巻線に電圧パルスが発生し、サイリスタの制御電極に印加されます。
電流パルスの後部が二次巻線を通過すると、逆極性の電圧パルスが発生します。このパルスは、二次巻線をバイパスする半導体ダイオードによって閉じられ、サイリスタには印加されません。
サイリスタが 2 つの変圧器で制御されると (図 3 を参照)、位相が 180 度ずれた 2 つのパルスが生成されます。
サイリスタモーター制御システム
DC モーター用のサイリスタ制御システムでは、モーターの DC 電機子電圧の変化を使用して速度を制御します。このような場合、通常は多相整流方式が使用されます。
図では。この種の最も単純な図は実線で示されている。この回路では、サイリスタ T1、T2、T3 のそれぞれが変圧器の二次巻線とモーターの電機子に直列に接続されています。 NS.等c. 二次巻線の位相がずれています。したがって、サイリスタの開き角を制御する際には、互いに位相がずれた電圧パルスがモータの電機子に印加されます。
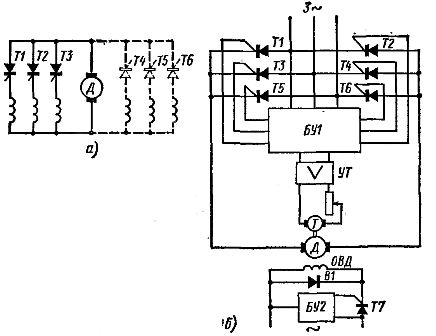
米。 5. サイリスタ駆動回路
多相回路では、選択したサイリスタの点弧角に応じて、断続的および連続的な電流がモーターの電機子を通過する可能性があります。可逆電気駆動装置 (図 5、a、回路全体) は、2 組のサイリスタ、T1、T2、T3 と T4、T5、T6 を使用します。
特定のグループのサイリスタを開くと、電気モーターの電機子の電流の方向が変わり、それに応じて回転方向も変わります。
モータの逆転は、モータの界磁巻線の電流の方向を変更することによっても実現できます。このような逆は、界磁巻線が電機子巻線と比較して非常に高いインダクタンスを有するため、高速性が要求されない場合に使用されます。このような逆ストロークは、金属切断機の主動作のサイリスタ駆動によく使用されます。
2 番目のサイリスタのセットにより、電気モーターの電機子の電流方向の変更が必要なブレーキ モードの実行も可能になります。検討中の駆動回路のサイリスタは、モータのオンとオフを切り替えるだけでなく、起動電流と制動電流を制限するために使用され、コンタクタや起動および制動加減抵抗器を使用する必要がなくなりました。
直流サイリスタの駆動回路では、電源トランスを使用すると設備が大型化してコストが増加するため、図1のような回路が使われることが多いです。 5B.
この回路では、サイリスタの点火はコントロールユニットBU1によって制御されます。これは三相電流ネットワークに接続されており、それによって電力が供給され、制御パルスの位相がサイリスタのアノード電圧と一致します。
サイリスタ ドライブは通常、モータ速度フィードバックを使用します。この場合、タコジェネレータTと中間トランジスタアンプUTが使用される。電子メールによるフィードバックも利用されます。等c. 電気モーター、電圧に対する負のフィードバックと電機子電流に対する正のフィードバックの同時動作によって実現されます。
励起電流を調整するには、制御ユニット BU2 を備えたサイリスタ T7 が使用されます。アノード電圧の負の半サイクルでは、サイリスタ T7 が電流を流さないとき、e により OVD 内の電流が流れ続けます。等c. 自己誘導、バイパスバルブ B1 を介して閉じます。
パルス幅制御を備えたサイリスタ電気ドライブ
考慮されているサイリスタ ドライブでは、モーターは 50 Hz の周波数の電圧パルスによって電力を供給されます。応答速度を上げるには、パルス周波数を高くすることをお勧めします。これは、パルス幅制御を備えたサイリスタ ドライブで実現され、最大 2 ~ 5 kHz の周波数で持続時間 (ラチチュード) が変化する方形 DC パルスがモーターの電機子を通過します。高速応答に加えて、このような制御により、広いモーター速度制御範囲とより高いエネルギー性能が実現します。
パルス幅制御では、制御されていない整流器によってモーターに電力が供給され、アーマチュアと直列に接続されたサイリスタが周期的に開閉します。この場合、DC パルスはモーターの電機子回路を通過します。これらのパルスの持続時間 (緯度) が変化すると、電気モーターの回転速度が変化します。
この場合、サイリスタは定電圧で動作するため、サイリスタを閉じるために特別な回路が使用されます。最も単純なパルス幅制御スキームの 1 つを図に示します。 6.
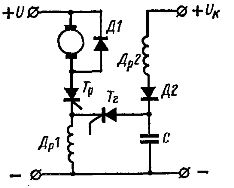
米。 6. パルス幅制御付きサイリスタ電気駆動
この回路では、ダンピングサイリスタTrがオンするとサイリスタTrがオフする。このサイリスタが開くと、充電されたコンデンサ C が放電して、 スロットル Dr1、重要な e を作成します。等c. この場合、チョークの両端に電圧が現れ、これは整流器の電圧 U より大きく、整流器に向けられます。
この電圧は整流器とシャント ダイオード D1 を介してサイリスタ Tr に印加され、サイリスタ Tr をオフにします。サイリスタがオフになると、コンデンサ C はスイッチング電圧 Uc > U まで再び充電されます。
電流パルスの周波数の増加とモーター電機子の慣性により、電源のパルス特性は実際にはモーター回転の滑らかさに反映されません。サイリスタ Tr と Tr は、パルス幅を変更できる特殊な位相シフト回路によってオープンされます。
電気業界では、完全に調整されたサイリスタ DC 電源ドライブのさまざまな改良版が製造されています。その中には、1:20 の速度制御範囲を持つドライブもあります。 1:200;電圧を変更することにより、1:2000、不可逆および可逆ドライブ、電気ブレーキの有無にかかわらず。制御はトランジスタ位相パルス装置によって実行されます。ドライブはモーターの回転数やカウンターなどに負のフィードバックを使用します。と
サイリスタ ドライブの利点は、高エネルギー特性、小型軽量、電気モーター以外に回転機械がないこと、高速で常に作業が可能な状態であることですが、サイリスタ ドライブの主な欠点は、コストが依然として高いことであり、価格を大幅に上回っていることです。電気機械と磁気増幅器を備えたドライブのコスト。
現在、サイリスタ DC ドライブを広範に置き換える着実な傾向が見られます。 可変周波数ACドライブ.