エレベータ・昇降機用モータの動力別選定
 住宅用および管理用の建物にある現代の旅客用および貨物用のエレベーター、および地雷を持ち上げるための一部の機械は、カウンターウェイト、またはカウンターウェイトと呼ばれることもありますが、これを使用して動作します。鉱山機械では、すでに述べたように、バランス調整はカウンターウェイトではなく、2 番目の吊り上げ容器によって行われることがよくあります。
住宅用および管理用の建物にある現代の旅客用および貨物用のエレベーター、および地雷を持ち上げるための一部の機械は、カウンターウェイト、またはカウンターウェイトと呼ばれることもありますが、これを使用して動作します。鉱山機械では、すでに述べたように、バランス調整はカウンターウェイトではなく、2 番目の吊り上げ容器によって行われることがよくあります。
エレベータのカウンタウェイトは、吊り上げ容器 (かご) の重量と持ち上げられる公称荷重の一部のバランスをとるように選択されます。

ここで、GH は公称吊り上げ荷重 N の重量です。 G0 — 客室重量、N; Gnp はカウンターウェイト N の重量です。 α はバランス係数で、通常は 0.4 ~ 0.6 に等しくなります。
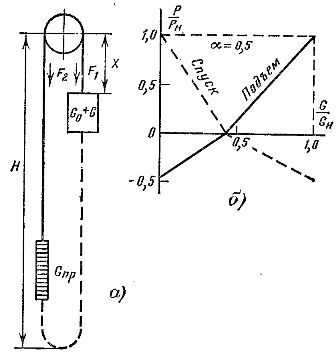
米。 1. エレベーターのモーターシャフトにかかる負荷を計算します。
釣り合いおもりがない状態で重い船を動かすには、相応のエンジン出力の増加が必要となるため、重い船のバランスを取る必要があることは明らかです。定格ペイロードの一部をバランスさせる能力は、特定の荷重曲線の等価電力を決定するときに明らかになります。たとえば、エレベータが主に荷重を上げ、空のかごを下げるために動作する場合、荷重図による等価エンジン出力は α = 0.5 で最小値になることを理解するのは難しくありません。
カウンタウェイトの存在により、エンジンの負荷曲線が平坦になり、動作中の発熱が軽減されます。図3に示す図を参照すると、次のことがわかる。 1、a、次にカウンターウェイトの重量値

また、バランスを保つロープやキャビンの摩擦、ガイド上のカウンターウェイトがない場合は、次のように書くことができます。


ここで、gk はロープ 1 m の重量、N / m です。
抗張力

モーターシャフトのトルクと出力は、次の式に基づいて決定されます。
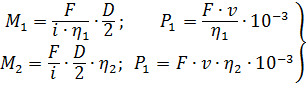
ここで、M1、P1 — ドライブがモーターモードで動作するときのトルクと出力、それぞれ Nm と kW。 M2、P2 — ドライブが発電機モードで動作するときのトルクと出力、それぞれ Nm と kW。 η1、η2 — 直接および逆エネルギー伝達によるウォーム ギアの効率。
η1 と η2 の値はウォーム シャフトの速度に非線形に依存し、次の式で計算できます。
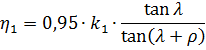

ここで、λ はウォームの割出シリンダ上の螺旋線の上昇角度です。 k1 は、ギアボックスのベアリングとオイルバスでの損失を考慮した係数です。 ρ — ウォーム シャフトの回転速度に応じた摩擦角。
トラクションシーブにかかる力の公式から、バランスロープがない場合、リフティングウインチの電気駆動装置にかかる負荷は、リフティング容器の位置に依存することがわかります。
最大 10 トンの大きな耐荷重、10 m/s 以上の高速移動速度、200 ~ 1000 m の高揚程および過酷な作業条件のため、鉱山吊り上げ機械には大きな質量のスチール ロープが装備されています。たとえば、一方のパスが地平線の下に降ろされ、もう一方のパスが上にあり、その瞬間に降ろされると想像してください。この位置では、ヘッド ロープ全体のバランスが崩れており、上昇の開始時にモーターは荷物とロープの重量によって生成される静的モーメントに打ち勝つ必要があります。ロープのバランスをとることは、スキップの経路の中央で行われます。その後、ロープが再び切れ、ロープの下降部分の重みがエンジンを降ろすのに役立ちます。
特に深い鉱山では荷重が不均一になると、エンジン出力を過大評価する必要が生じるため、吊り上げ高さが 200 ~ 300 m を超える場合は、吊り下げられたテール ロープの助けを借りてヘッド吊り上げロープのバランスをとることをお勧めします。吊り上げ容器の。通常、テールロープはメインロープと同じ断面と長さのものを選択し、その結果、吊り上げシステムのバランスが取れていることがわかります。
エレベーターや昇降機の動作中に負荷が変化するため、各負荷のモーターシャフトの出力またはモーメントを決定するには、負荷に対するこれらの値の依存性のグラフを作成すると便利です。いくつかの点で、図に示すものとほぼ同じ性質を持っています。 1b を参照し、負荷図の作成に使用します。
この場合、昇降機の電気駆動装置の動作モードを知る必要があります。これは主に、PV 作動の相対的な持続時間とモータの 1 時間あたりの始動回数によって決まります。たとえば、エレベータの場合、電気駆動装置の動作モードは、エレベータの設置場所と目的によって決まります。
住宅用建物では、交通スケジュールは比較的均一であり、相対的な継続時間、つまり PV とモーターの始動頻度 h は、それぞれ 40% に等しく、1 時間あたり 90 ~ 120 回の始動となります。高層オフィスビルでは、従業員の出勤時間帯と退勤時間帯にエレベーターの負荷が急激に増加するため、昼休み中は高い値のPVとh-40-60%および150になります。 -1時間あたり200回スタート。
図面が完成したら モーターシャフトの静荷重、電気駆動システムとホイスト モーターが選択されたら、負荷図に対する過渡現象の影響を考慮して、負荷図を作成する第 2 段階を実行できます。
完全な負荷図を作成するには、電気駆動装置の加速時間と減速時間、ドアの開閉時間、車両の移動中の停止回数、走行時間を考慮する必要があります。最も典型的な作業サイクル中に乗降する乗客の数。自動ドアを備えたエレベーターの場合、ドアの操作とかごの満員によって決まる合計時間ロスは 6 ~ 8 秒です。
車の公称速度と加速(減速度)とジャークの許容値がわかっていれば、車の加速と減速の時間は動作図から決定できます。電気駆動システムの示された静的および動的モードに従って構築された負荷図によれば、よく知られた方法の 1 つである平均損失または同等の値を使用して、加熱時のモーターの計算を行う必要があります。
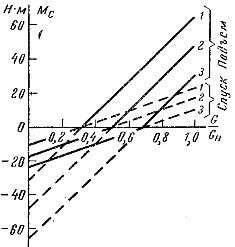
米。 2. エレベータかごが 1 階 (1)、昇降路の中央 (2)、および最終階 (3) にある場合の、エレベータかごの負荷に対する電気駆動装置のトルクの依存性。

例。高速乗客用エレベーターの技術データに従って、さまざまな動作モードでのモーター シャフトの静モーメントを決定します。
与えられる:
• 最大耐荷重 Gn = = 4900 N。
• 移動速度 v = 1 m/s。
• 吊り上げ高さ H = = 43 m。
• 客室重量 G0 = 6860 N。
• カウンタウェイト重量 Gnp = 9310 N。
・トラクションビームの直径 Dm = 0.95 m。
• ウインチギアボックスの変速比 i = 40。
・シャフトガイド上のキャビン摩擦を考慮した伝達効率η=0.6。
• ロープの重量 GKAH = 862 N。
表1

抗張力:


エレベータシステムの起動時、Fc > 0 の場合は駆動電動機はモータモードで動作し、Fc が 0 の場合はモータモードで動作し、Fc < 0 の場合はモータモードで動作します。
式に従って静的モーメントを計算した結果を表にまとめます。図1のグラフに示されている。 2.より正確な計算では、シャフト ガイドの動きに対する抵抗 (Fc の 5 ~ 15%) を考慮する必要があることに注意してください。