巻線ローターモーターの始動
非同期モーターの始動特性は、その設計の特性、特にローター装置に依存します。
誘導モータの始動には、ロータが静止状態から均一回転状態に移行することに関連する機械の過渡プロセスが伴います。このプロセスでは、モータのトルクがモータに加わる抵抗力のモーメントと釣り合います。機械のシャフト。
非同期モーターを起動すると、供給ネットワークからの電気エネルギーの消費が増加します。これは、シャフトにかかる制動トルクに打ち勝ち、非同期モーター自体の損失をカバーするためだけでなく、特定の運動を伝達するためにも消費されます。生産ユニットの可動リンクにエネルギーを供給します。したがって、始動時に誘導電動機は増加したトルクを発生させる必要があります。
回転子を備えた誘導電動機の場合、n = 1 の滑りに対応する始動トルクは、回転子回路に導入された調整可能な抵抗器の有効抵抗に依存します。
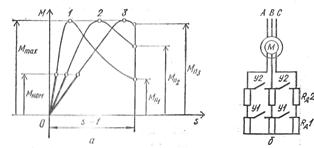
米。 1.巻線ロータを使用した三相非同期モータの始動: a — ロータ回路内の抵抗器のさまざまな有効抵抗における滑りによる、巻線ロータを備えたモータのトルク依存性のグラフ、b — 抵抗器を接続し、接点を閉じるための回路ローター回路への加速。
したがって、加速接点 U1、U2 が閉じている場合、つまりスリップリングが短絡して誘導電動機を始動する場合、初期始動トルク Mn1 = (0.5 -1.0) Mnom および初期始動電流 Azn = ( 4.5 — 7) Aznom およびその他。
巻線ロータを備えた非同期電気モータの小さな始動トルクは、生産ユニットを駆動してその後の加速を行うには不十分である可能性があり、始動電流が大きいとモータ巻線の加熱が増加し、スイッチング周波数が制限され、ネットワークが制限されます。電力が低いと、他の受信機の動作にとって望ましくない一時的な電圧降下が発生します。これらの状況が、作業機構の駆動に大きな始動電流を伴う巻線型誘導電動機の使用を妨げる理由である可能性があります。

モーターの回転子回路に始動抵抗と呼ばれる調整可能な抵抗を導入すると、初期始動電流が減少するだけでなく、同時に初期始動トルクが増加し、最大トルク Mmax (元の 1、a、曲線 3)、相巻線ローターモーターの臨界滑りの場合
skr = (R2' + Rd') / (X1 + X2') = 1、
ここで、Rd' — モーターの回転子巻線の位相における抵抗器の有効抵抗を、固定子巻線の位相に換算したものです。始動抵抗器のアクティブ抵抗をさらに増加させることは、初期始動トルクが弱まり、スリップ領域 s>1 で最大トルク点を抜けてしまい、ローターが加速する可能性がなくなるため、現実的ではありません。
フェーズローターモーターを始動するために必要な抵抗器の有効抵抗は、始動要件に基づいて決定されます。Mn = (0.1 — 0.4) Mnom の場合は軽く、Mn — (0.5 — 0.75) Mn の場合は正常、Mn の場合は厳しくなります。 ≧I。
生産ユニットの加速中に相巻線ローターモーターで十分に大きなトルクを維持するには、過渡プロセスの時間を短縮し、モーターの加熱を減らすために、アクティブ抵抗を徐々に減らす必要があります。始動抵抗器の。加速中のトルクの許容変化 M (t) は、ピークトルク制限 M> 0.85Mmax、スイッチングモーメント M2 >> Ms (図 2)、および加速度を制限する電気的および機械的条件によって決まります。

米。 2. 巻線ロータを備えた三相非同期モータの始動特性

始動抵抗器の組み込みは、加速中にトルク M がスイッチングモーメント M2 に等しくなるとき、エンジン始動の瞬間から数えて時間 t1、t2 にそれぞれアクセル Y1、Y2 を連続的に組み込むことによって確保されます。したがって、始動全体を通じて、すべてのピークトルクは同じであり、すべてのスイッチングトルクは互いに等しいことになります。
巻線ロータを備えた非同期モータのトルクと電流は相互に関係しているため、ロータ加速時のピーク電流制限 I1 = (1.5 — 2.5) Aznom とスイッチング電流 Az2 を設定することが可能であり、スイッチング モーメント M2 を確保する必要があります。 > ℃
巻線ロータを備えた非同期モータの電源ネットワークからの切断は、ステータ巻線の各相に過電圧が発生するのを避けるために、常にロータ回路を短絡して行われます。モーターが停止した瞬間にローター回路が開いている場合は、3 ~ 4 回。
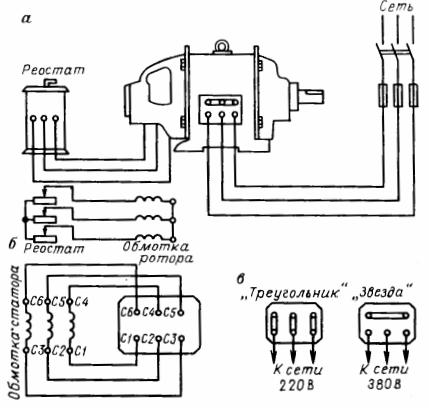
米。 3. 相回転子を備えたモーター巻線の接続方式: a — 電力網へ、b — 回転子、c — 端子盤上。
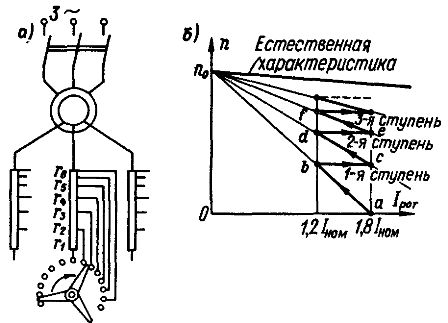
米。 4. フェーズローターによるモーターの始動: a — スイッチング回路、b — 機械的特性