電位差センサー
ポテンショメータ センサは電源電圧が印加される可変抵抗器で、その入力値は集電接点の線形変位または角度変位、出力値はこの接点によって取得される電圧であり、その大きさは位置に応じて変化します。変化します。
電位差センサーは、線形変位または角度変位を電気信号に変換し、自動および連続タイプの自動デバイスの最も単純な機能依存関係を再現するように設計されています。
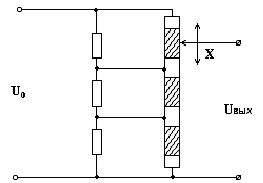
 電位差センサーの接続図
電位差センサーの接続図
電位差センサーは抵抗によって次のように分類されます。
-
一定の抵抗を持つラメラ。
-
連続巻線のワイヤーコイル。
-
抵抗層付き。

層状電位差センサーは、特定の設計上の欠陥により、比較的粗い測定を行うために使用されていました。
このようなセンサーでは、特別な方法で名目上選択された定抵抗器がラメラにはんだ付けされています。
ラメラは、コレクタ接点がその上をスライドする導電性要素と非導電性要素が交互に配置された構造です。集電装置がある導電要素から別の導電要素に移動すると、それに接続されている抵抗の合計抵抗が、1 つの抵抗の公称値に対応する量だけ変化します。抵抗の変化は広範囲にわたって発生する可能性があります。測定誤差は接触パッドのサイズによって決まります。
層状ポテンショメータ センサー
ワイヤー ポテンショメータ センサーは、より正確な測定を行うために設計されています。原則として、それらの設計は、ゲティナックス、テキストライト、またはセラミックで作られたフレームであり、その上に細いワイヤーが一層で巻かれ、順番に回転し、そのきれいな表面上で集電体がスライドします。
ワイヤーの直径が決まります 精度クラス ポテンショメータセンサー (高は 0.03 ~ 0.1 mm、低は 0.1 ~ 0.4 mm)。線材:マンガニン、フェクラル、貴金属ベースの合金。スリップリングはワイヤーの擦れを防ぐために柔らかい素材で作られています。
ポテンショメータセンサーの利点:
-
デザインのシンプルさ。
-
サイズと重量が小さい。
-
静特性の直線性が高い。
-
特性の安定性。
-
交流および直流での動作が可能。
ポテンショメータセンサーの欠点:
-
摺動接点の存在。接点トレースの酸化、ターンの摩擦、またはスライダの曲がりにより損傷を引き起こす可能性があります。
-
負荷による動作エラー。
-
変換係数が比較的小さい。
-
高感度閾値。
-
ノイズの存在。
-
インパルス放電の影響による電気浸食の影響を受けやすい。

電位差センサーの静特性
不可逆電位差センサーの静特性
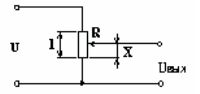
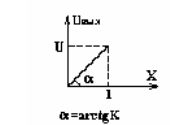
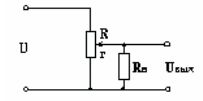
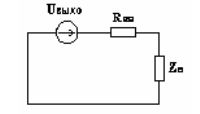
例として、連続コイルを備えたポテンショメータ センサーを考えてみましょう。ポテンショメータの端子には交流または直流の電圧 U が印加され、入力値は変位 X、出力値は電圧 Uout となります。アイドル モードの場合、次の関係が真であるため、センサーの静的特性は線形です: Uout = (U / R) r、
ここで、R はコイル抵抗です。 r はコイルの一部の抵抗です。
r / R = x / l (l はコイルの全長) とすると、Uout = (U / l) x = Kx [V / m] となります。
ここで、K はセンサーの変換 (透過) 係数です。
明らかに、このようなセンサーは入力信号の符号の変化には反応しません (センサーは不可逆的です)。署名の変更に敏感なスキームがあります。このようなセンサーの静特性は図のような形になります。
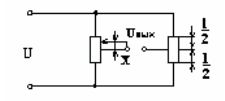
ポテンショメータセンサーの可逆回路
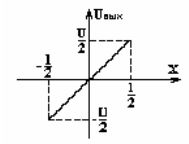
可逆電位差センサーの静特性
結果として得られる理想的な特性は、さまざまな種類の誤差が存在するため、実際の特性とは大きく異なる場合があります。
1. デッドゾーン。
出力電圧はターンごとに離散的に変化します。このゾーンは、入力値が小さい場合に Uout が変化しない場合に発生します。
電圧ジャンプの大きさは、DU = U / W (W は巻き数) の式で決まります。
感度のしきい値はコイル ワイヤの直径によって決まります: Dx = l / W。
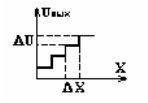
デッドバンド用の電位差センサー
2. 線径、抵抗値、巻きピッチのばらつきによる静特性のばらつき。
3. モーターの回転軸とガイドスリーブの間に発生するバックラッシュによる誤差(圧縮バネを使用して軽減しています)。
4.摩擦による誤差。
ポテンショメータ センサーのブラシを駆動する要素の電力が低い場合、摩擦により停滞ゾーンが発生する可能性があります。
ブラシの圧力は慎重に調整する必要があります。
5. 負荷の影響による誤差。
負荷の性質に応じて、静的モードと動的モードの両方でエラーが発生します。能動負荷がかかると静特性が変化します。出力電圧値は次の式に従って決まります: Uout = (UrRn) / (RRn + Rr-r2)
これらは。 Uout = f (r) は Rn に依存します。 Rn >> R の場合、Uout = (U / R) r であることがわかります。
Rn が R にほぼ等しい場合、依存関係は非線形となり、センサーの最大誤差はスライダーが (2/3))l から逸脱したときになります。通常、Rн / R = 10 … 100 を選択します。x = (2/3) l での誤差の大きさは、式 E = 4/27η で決定できます。ここで、η= Rн / R — 負荷係数です。
負荷時の電位差センサー
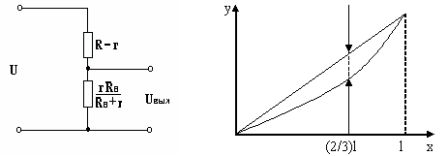 a — 負荷を伴う電位差センサーの等価回路、b — 電位差センサーの静特性に対する負荷の影響。
a — 負荷を伴う電位差センサーの等価回路、b — 電位差センサーの静特性に対する負荷の影響。
電位差センサーの動的特性
送信機能
伝達関数を導出するには、負荷電流を出力値として取得する方が便利です。これは等価生成定理を使用して決定できます。 B = Uout0 / (Rvn + Zn)
次の 2 つのケースを考えてみましょう。
1. Uout0 = K1x In = K1x / (Rin + Rn) であるため、負荷は純粋にアクティブ Zn = Rn です。
ここで、K1 はセンサーのアイドル速度です。
ラプラス変換を適用すると、伝達関数 W (p) = In (p) / X (p) = K1 / (Rin + Rn) = K が得られます。
このようにして、慣性のない接続が得られました。これは、センサーがこの接続に対応するすべての周波数および時間特性を備えていることを意味します。
等価回路
2. 能動部品による誘導負荷。
U = RvnIn + L (dIn / dt) + RnIn
ラプラス変換を適用すると、Uoutx (p) = In (p) [(Rvn + pL) + Rn] が得られます。
変換を通じて、W (p) = K / (Tp + 1) という形式の伝達関数に到達できます。これは 1 次の非周期接続です。
ここで、K = K1 / (Rvn + Rn)
T = L / (Rvn + Rn);
ポテンショメータセンサーの内部ノイズ
 図に示すように、ブラシが次のターンに移動すると、出力電圧が急激に変化します。ステッピングによって生じる誤差は、伝達関数の出力電圧に重畳されたノコギリ波電圧の形になります。ノイズです。ブラシが振動すると、その動きによってノイズ(干渉)も発生します。振動ノイズの周波数スペクトルは可聴周波数範囲にあります。
図に示すように、ブラシが次のターンに移動すると、出力電圧が急激に変化します。ステッピングによって生じる誤差は、伝達関数の出力電圧に重畳されたノコギリ波電圧の形になります。ノイズです。ブラシが振動すると、その動きによってノイズ(干渉)も発生します。振動ノイズの周波数スペクトルは可聴周波数範囲にあります。
振動をなくすために、パンタグラフは長さの異なる複数のワイヤーを折り重ねて作られています。そうすれば、各ワイヤーの固有振動数が異なるため、技術的な共振の発生が防止されます。熱雑音のレベルは低く、特に敏感なシステムでは考慮されます。
機能的な電位差センサー
オートメーションでは、非線形依存関係を取得するために関数伝達関数がよく使用されることに注意してください。これらは次の 3 つの方法で構築されます。
-
コイルに沿ってワイヤの直径を変更する。
-
コイルピッチ変更。
-
特定の構成のフレームの使用。
-
異なるサイズの抵抗を備えた線形ポテンショメータのセクションを操作することによって。
例えば、3番目の方法で2次依存性を求めるには、図に示すように枠の幅を線形に変化させる必要があります。
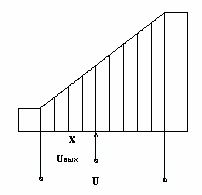
機能的なポテンショメータセンサー
多回転ポテンショメータ
従来のポテンショメータ センサの動作範囲は限られています。その値は、フレームの幾何学的寸法とコイルの巻き数によって決まります。無制限に増加することはできません。したがって、抵抗素子がらせん状に数回巻かれ、モーターがコイルの一方の端からもう一方の端に移動するように、抵抗要素の軸を数回回転させる必要があるマルチターンポテンショメータセンサーが応用されています。このようなセンサーの電気範囲は 3600 の倍数です。
マルチターンポテンショメータの主な利点は、分解能と精度が高いことです。これは、全体の寸法が小さく、抵抗素子の長さが長いため実現されます。
フォトポテンショメータ
光ポテンショメータ — 抵抗層を備えた従来のポテンショメータの非接触類似品で、その機械的接触が光導電性接触に置き換えられており、当然、信頼性と耐用年数が向上します。光電位差計からの信号は、スライダーとして機能する光プローブによって制御されます。これは特別な光学デバイスによって形成され、光導電層に沿った外部の機械的作用の結果として変位する可能性があります。光層が露出した時点で、(暗部と比較して)過剰な光導電性が発生し、電気的接触が形成されます。
フォトポテンショメータは、目的に応じて線形タイプと機能タイプに分けられます。
機能的な光電位差計を使用すると、プロファイルされた抵抗層 (双曲線、指数関数、対数) により、光源の空間運動を特定の関数形式で電気信号に変換できます。