さまざまなモード、電圧、周波数での誘導モーターの機械的特性
 誘導電動機の機械的特性は、n=f(M)またはn=e(I)で表すことができます。ただし、非同期モーターの機械的特性は、多くの場合、依存性 M = f(S) の形式で表されます。ここで、C はスライディング、S = (nc-n) / nc、ns は同期速度です。
誘導電動機の機械的特性は、n=f(M)またはn=e(I)で表すことができます。ただし、非同期モーターの機械的特性は、多くの場合、依存性 M = f(S) の形式で表されます。ここで、C はスライディング、S = (nc-n) / nc、ns は同期速度です。
実際には、Kloss 公式と呼ばれる簡略化された公式が、機械的特性のグラフィカルな構築に使用されます。

ここで: Mk — 臨界 (最大) トルク値。このモーメント値は臨界滑りに相当します

ここで、λm = Mk / Mn
クロスの公式は、誘導モーターを使用して実行される電気駆動に関連する問題を解決するために使用されます。 Kloss 公式を使用すると、誘導モーターのパスポート データに従って機械的特性のグラフを作成できます。実際の計算では、ルートの前のクリティカル モーメントを決定するときに式でプラス記号のみを考慮する必要があります。
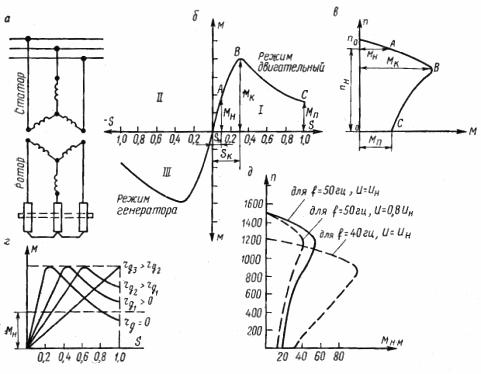
米。 1.非同期モーター: a — 概略図、b — 機械的特性 M = f (S) — モーターおよび発電機モードでの自然な機械的特性、c — モーター モードでの自然な機械的特性 n = f (M)、d — 人工加減抵抗器の機械的特性e — さまざまな電圧および周波数に対する機械的特性。

かご形誘導電動機
図からわかるように。 1、I 象限と III 象限に位置する誘導モーターの機械的特性。第 1 象限の曲線の部分は正のスリップ値に対応し、非同期モーターの動作モードを特徴付けます。また、第 3 象限では発電機モードを特徴付けます。実用上最も重要なのはエンジン モードです。
モーターモードの機械的特性のグラフには、A、B、Cの3つの特性点が含まれており、条件に応じてOBとBCの2つのセクションに分けることができます(図1、c)。
点 A はモーターの公称トルクに対応し、式 Mn = 9.55・103・(Strn /nn) によって決定されます。
この瞬間が対応している 公称滑り一般的な産業用途のエンジンの場合、この値は 1 ~ 7% の範囲になります (Sn = 1 ~ 7%)。同時に、小型エンジンのスリップは大きくなり、大型エンジンのスリップは小さくなります。
衝撃負荷を目的とした高スリップモーターの誤差は Сn~15% です。これらには、たとえば、単直列 AC モーターが含まれます。
特性の C 点は、起動時にモータ軸に発生する初期トルク値に対応します。この瞬間の Mp は初期または開始と呼ばれます。この場合、滑りは 1 に等しく、速度はゼロです。 始動トルク 公称 Mp / Mn に対する始動トルクの比を示す参照テーブルのデータから簡単に決定できます。
電圧と電流周波数の一定値での始動トルクの大きさは、ローター回路のアクティブ抵抗に依存します。この場合、最初はアクティブ抵抗が増加するにつれて始動トルクの値も増加し、回転子回路のアクティブ抵抗がモーターの総誘導抵抗に等しいときに最大値に達します。その後、ロータのアクティブ抵抗が増加するにつれて、イニシャルトルクの値は減少し、限界でゼロになる傾向があります。
点 C (図 1、b、c) は、n = 0 から n = ns までの全回転範囲でエンジンを開発できる最大モーメントに対応します。このモーメントは臨界 (または転倒) モーメント Mk と呼ばれます。 。限界モーメントは限界滑り Sk にも対応します。限界滑り Sk の値が小さいほど、また公称滑り Сn の値が小さいほど、機械的特性の剛性は大きくなります。
開始瞬間と決定的瞬間は名目上の瞬間によって決まります。かご型電動機の GOST によれば、Mn / Mn = 0.9 ~ 1.2、Mk / Mn = 1.65 ~ 2.5 の条件を満たす必要があります。
臨界モーメントの値は回転子回路の能動抵抗に依存しないが、臨界滑りСkはこの抵抗に直接比例することに留意すべきである。これは、ローター回路のアクティブ抵抗が増加しても、臨界モーメントの値は変化しないが、トルク曲線の最大値がスリップ値の増加にシフトすることを意味します(図1、d)。
臨界トルクの大きさは、ステータに印加される電圧の二乗に正比例し、電圧の周波数の二乗とステータ内の電流の周波数に反比例します。
たとえば、モーターに供給される電圧が定格値の 85% に等しい場合、臨界トルクの大きさは、定格電圧で 0.852 = 0.7225 = 72.25% の臨界トルクになります。
周波数を変更するとその逆が観察されます。たとえば、電流周波数 = 60 Hz で動作するように設計されたモーターに、周波数 = 50 Hz の供給電流がある場合、臨界モーメントは (60/50)2=1.44 倍になります。公式値はその周波数です(図1、e)。
臨界瞬間は、モーターの瞬間的な過負荷容量を特徴づけます。つまり、モーターが有害な結果なしに過負荷の瞬間 (数秒以内) に耐えることができるかを示します。

ゼロから最大 (臨界) 値までの機械的特性のセクション (図 1、biv を参照) は特性の安定部分と呼ばれ、セクション BC (図 1、c) は不安定部分と呼ばれます。
この区分は、スリップの増加に伴って OF 特性の一部が増加するという事実によって説明されます。速度が低下すると、エンジンによって発生するトルクが増加します。これは、負荷が増加すると、つまり制動トルクが増加すると、モータの回転速度が低下し、それによって増加するトルクが増加することを意味します。逆に負荷が減少すると速度は増加し、トルクは減少します。特性の安定部の全域で負荷が変化すると、モータの回転速度やトルクが変化します。
モーターは臨界トルクを超えるトルクを発生させることができず、制動トルクがそれよりも大きい場合、モーターは必然的に停止する必要があります。よく言われるように、エンジンの横転が起こります。
U と I が一定で、回転子回路に追加の抵抗がない場合の機械的特性は、自然特性 (回転子回路に追加の抵抗がない巻線回転子を備えたかご型誘導電動機の特性) と呼ばれます。人工特性またはレオスタティック特性は、ローター回路の追加抵抗に対応する特性と呼ばれます。
すべての始動トルク値は異なり、ローター回路のアクティブ抵抗によって異なります。異なる大きさのスライダーは、同じ公称トルク Mn に対応します。ローター回路の抵抗が増加すると、滑りが増加するため、モーターの速度が低下します。
回転子回路には能動抵抗が含まれているため、安定部の機械的特性は抵抗に比例して滑りが増加する方向に引き伸ばされます。これは、モータの回転速度が軸負荷に応じて大きく変化し始め、ハードな特性がソフトな特性になることを意味します。