電気駆動制御回路
 旅客用エレベーターの速度に応じて、次のタイプの電力制御回路が採用されます。
旅客用エレベーターの速度に応じて、次のタイプの電力制御回路が採用されます。
-
低速エレベーターには、かごまたはフェーズローターモーターとボタンまたはレバー制御装置が付いています。
-
高速エレベーター - 制御ボタンを備えた磁気ステーションまたはサイリスタ制御ステーション (TSU-R) によって制御される 2 速または 1 速モーター、
-
高速および高速エレベーター - 異なる励起スキームを備えた「発電機 - モーター」システムまたはボタンを備えた「サイリスタコンバーター - モーター」システムによって制御される DC モーター、
-
非同期バルブカスケードチェーン (AVK) も使用でき、これを使用すると効率を高めることができます。インストール。
乗客用エレベーターは、乗客の流れ、昇降高さ、乗客にサービスを提供するエレベーターの数に応じて、シングル制御とグループ制御に分けられます。
シングルには次のものが含まれます。
a) エレベーターは、乗客の降下および上昇中に停止を通過することなく、単一の命令と呼び出しで動作します。
b) 下り時には乗客が乗車できるが、上り時には呼び出しが禁止されるエレベーター、
c) 同じですが、降下時に呼び出しが登録され、その後の実行が行われます。
グループ運営のエレベーターには次のものがあります。
a) 設置されたエレベーターの数に関係なく、乗り場を呼び出すための 1 つのボタンを備えたエレベーター (二重制御がより頻繁に使用されます)、および降下時に乗客が乗車するエレベーター、
b) 同様ですが、乗降のために中間階に乗客が完全に集まります(通常は行政、教育、その他の建物に設置されます)。
さらに、回路の状態が 1 つの指令コンソールから監視され、複数のエレベーターが制御される場合、エレベーターを多数の家や近隣全体に送ることは非常に一般的です。
エレベーターの速度、単一またはグループ制御に関係なく、ほとんどのスキームに必要な要素は次のとおりです。
-
自動調整ボタン、タクシーを呼び、タクシーに命令するための粘着ボタンまたは閉じるボタン、
-
キャビンの位置と電気回路の状態を登録するためのさまざまな選択センサーと正確な停止マッチング装置、
-
巻上げロープの状態、鉱山とキャビンのドア(開いているか閉じているか)の状態を検出するセンサーとインターロック、
-
速度と客室負荷の程度を制限するリミットスイッチ、
-
かごの移動方向、および一部のエレベータではかご内の荷物の存在を示すインジケータ。
これらの項目のうち、位置照合装置 (PSC) について詳しく説明します。PSC は、呼び出しや命令が発生したときにトロッコが停止する必要がある場所と、トロッコの上下の動きを決定します。残りの項目は通常、他のコースで知られているリミット スイッチのさまざまな修正です。
構造的には、位置照合装置は、鉱山内に設置された 3 位置の電気機械式、誘導式、または磁気式 (リード) センサーのセットの形で実装され、信号は機関室のリレーまたは非接触セレクターに出力されます (CCP が実装される場合もあります)。エンジンルームに配置された中央フロアユニットの形で)…
鉱山内に設置されたセンサーは、キャブに取り付けられた分岐器 (電気機械用) または磁気シャント (誘導スイッチまたはリードスイッチ用) と相互作用し、機関室に設置された中央フロアユニット (ステップコピー機またはリレーリレー) に信号を送信します。後者は、受信したコマンドを実行するための信号を送信し、制御回路に送信します。
車の動き信号用のセンサーを車の上下に配置し(必要な配線の数が少なくなり)、地雷の必要な箇所に磁気シャントを設置する方がより便利です。この場合、デジタル制御では、シャフトに沿ってシャントが設置されている柱の数は、バイナリまたはその他のコードで送信される階数のビット数と等しくなります。
3 ポジションの電気機械スイッチは、カーリング機構によってキャブの上下の動き、またはその停止に対応する位置の 1 つに移動します。この場合、かごが動いているときは、通過した階のスイッチの接点が終端位置のいずれかにオンになり、一連の呼び出しと命令の動作に備え、かごが停止するとスイッチがオンになります。中央の位置に移動すると、方向性接触器からの制御回路がオフになり、注文ボタンまたは呼び出しボタンが誤って押されたときにかごがフロアを離れることがなくなります。
エレベータかごの比較的正確な制動を保証するために、最近、非接触誘導または接触シールされた磁気制御(リード)センサが制御回路に使用され始めました。これらのセンサーは鉱山と客室の両方に設置されています。鉱山には選択(減速)用のセンサーがあり、客室には正確に停止するためのセンサーがあります。センサーと接続するために、ランタン磁気選択シャントがコックピットに配置され、強磁性精密停止シャントがシャフト (各フロア) に配置されます。
誘導センサーは、ハウジングに囲まれたコイルを備えた開いた U 字型磁気回路で構成されています。エグゼクティブリレーの巻線はそれに直列に接続されており、交流電圧(U)が印加されます。
開磁気回路では、コイルを横切る磁束は小さくなります。したがって、e.m.f.コイルワイヤ内の自己誘導電流、およびそれによって生じる誘導抵抗 (X) は実質的に存在しないため、コイルの抵抗はアクティブ (R) になります。直列接続されたコイルの電流は比較的大きくなります。接点システムの接点が閉じる(リレーがオンになる)ことを模倣します。
シャントが U 字型の磁気回路を閉じると、そのコイルを横切る磁束が増加し、そのため起電力が増加します。自己インダクタンスとそれによるコイルの誘導抵抗。その結果、直列に接続されたコイルの電流が減少し、接点システムの回路が開く(エグゼクティブリレーがオフになる)ことをシミュレートします。
リードスイッチはU字型の本体で、溝の片側に内部が真空になった2つの密閉ガラスフラスコが配置され、それぞれのエレベータ制御回路に接続されたバネ板に接点が固定されています。スロットの反対側には永久磁石があります。このようなセンサーの動作要素は、エレベータかごが移動するときに U 字型の切り込みを通過する強磁性シャントです。
これらのセンサーの動作原理は次のとおりです。リード スイッチの接点プレートのバネ力は、永久磁石の磁界が接点プレートに作用しない場合、常開接点が開き、常開接点が開くように方向付けられます。閉じた接点は閉じています。つまり、これらの接点が接続されている回路が開閉します。
このリード スイッチ状態は、永久磁石の磁力線がシャント全体で閉じているため、強磁性シャントが U 字型本体の溝内にあるときになります。シャントが溝から出ると、磁力線は全体にわたって閉じます。プレートはそのバネ作用に打ち勝ち、リードスイッチ接点、したがってそれらが接続されている回路は逆の状態になります。

エレベータ制御方式の主な特徴を反映する例として、図 1 に示す、関連する停止装置のない単一エレベータの制御方式を考えてみましょう。 1. エレベーターは 4 階まで対応します。実行モータとして2速非同期モータMを使用する。
モーターの低回転 (Ml) または高回転 (B) の組み込みは、対応するコンタクター M1 および B によって実行されます。モーターの回転方向はコンタクター B および H、減速 - 追加の抵抗器 P による停止 - によって決定されます。電磁ブレーキETによる。
フロアスイッチとして使用 非接触誘導センサー (DTS、DTOV、DTON) はリレー コイル (RIS、RITOV、RITON) と直列に接続されます。 TTP センサーは、エレベーターの駆動を高速化し、減速の衝動を与えるために使用されます。一方、DTOV および DTON センサーは、エレベーターを対応する階の階レベルで正確に停止するように設計されており、かごに設置されています。それらのための磁気シャントはシャフトのシャフトに取り付けられています。
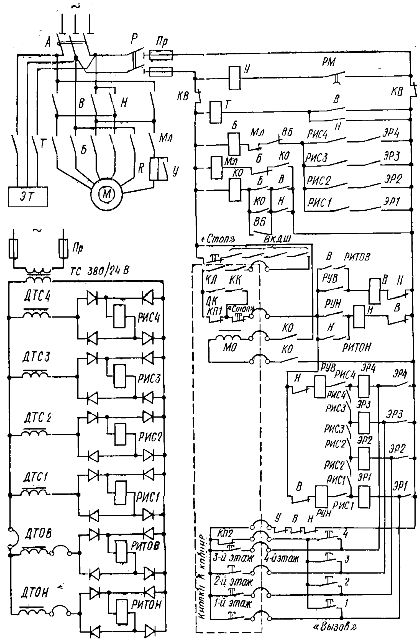
米。 1. 単一エレベータ制御の概略図
自動機 A、断路器 P、およびリミット スイッチ KB が、乗客のいるキャビンを 1 階から 3 階に移動する例を使用して、回路の残りの要素の目的とその動作を考えてみましょう。緊急モードではキャビンが上下に動き、閉鎖され、キャビンは 1 階にあります。この場合、1階のリレーに加え、RISリレーのコイルにも定格電流が流れます。
«3階»ボタンを押すと、次の電気回路が形成されます: ネットワーク相 — 断路器の極 P — ヒューズ Pr — リミットスイッチ KB — ボタン«停止» — 鉱山ドアのロック D1 — D4 — テンション用の接点ロープ KK — 安全リミットスイッチ KL — キャビンドアスイッチ DK — «停止» ボタンの接点 — ブロックを開く接点 Н — リレーコイル RUV — リレー RIS4 および RISZ の閉接点 (これらのリレーのコイルには電流が流れます) — コイルフロアリレーのERZ — ボタン«3階» — オープニングブロック — コンタクタU、B、Nの接点 — リミットスイッチKB — ヒューズ R — 断路器ポール P — ネットワーク相。
リレー RUV と ER3 が作動すると、順方向トラベル コンタクタ B、ファスト トラベル コンタクタ B (コイル回路 B - ブロック接点 ML - 高速スイッチ VB - リレー接点 RISZ および ER3) がオンになります。接点 B と B が閉じると、モーターは主電源、コンタクタ T、リリース プーリー、シャント ソレノイド MO をオンにして低速コンタクタ コイル M1 の回路を準備するシャント コンタクタ KO に接続されます。スイッチオン。ストロークが後退し、ロックレバーが解放され、キャブが動き始めます。
キャビンが 3 階に近づくと、強磁性シャントが TTSZ センサーのコイルを閉じ、その抵抗が増加し、RISZ リレーが消えて、ER3 リレーと RUV リレーがオフになります。その結果、接触器Bが消えてその接点が閉じ、低速接触器M1がオンになり、車が動いているときは精密ブレーキセンサーの磁気回路がまだ閉じていないため、接触器Bはオンのままになります。 RITOVの連絡先はまだ開いていません。モーターは、ステーターの 1 つの相に導入された抵抗 R を使用して、発電機モードで低速動作すると停止します。
車の床が床の床と揃うとすぐに、磁気シャントが正確な停止センサー DTOV のコイルの磁気回路を閉じ、リレー RITOV が消え、コンタクター B、次に KO、そして最後に ML が回転します。その結果、モータ電磁石とブレーキが主電源から切り離され、機械ブレーキが作動し、キャブが停止します。
かごを下降させるときのみ通過停止を備えたエレベーターを制御するための集合的なスキーム、または完全な集合的なスキームを学習する。車が上下に移動しているときに停止を通過する場合、図で説明したものと同様のスキームが必要です。 1、いくつかの追加を紹介します。たとえば、2 速モーター回路には、図に示すように、ID 誘導センサー、RIS リレー、各階の呼び出しボタンと注文ボタンが含まれます。 2.
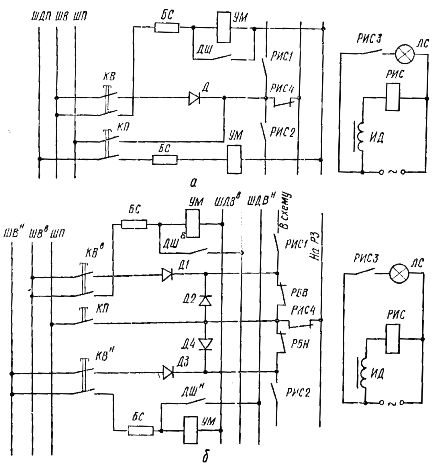
米。 2. エレベーター一括制御方式の追加部分(1階分)
キャビンを下げるときに通過停止を伴うスキーム (図 2、a) では、呼び出しと命令は別個の粘着ボタンによって与えられるため、車両の移動期間を除き、いつでも登録してすぐにスキームに送信できます。実行回路への転送接点コールの供給バスが、正のバスからの選択接点によってオフになったとき、乗客が乗った状態の客室。
完全な選択制御スキーム (図 2、b) では、乗車 (ШДВв) キャビンと下降 (ШДВн) キャビン用のリンギング回路が追加されており、ブロッキング リレー RBV および RBN の接点は選択セクション回路実行回路の接点に接続されています。 。
図3〜図6に示す図において、図1および図2に示すように、床にキャビンがない場合、ID誘導センサおよびRISリレーのコイルが通電される。したがって、コマンドコマンドボタンを押すか、KVを呼び出すと(DShのこのフロアにある鉱山ドアの接触によって克服されるまで、UM保持磁石によってオン状態に保持されます)、回路が形成されます(そうではありません)。これには、目的階が駐車場の階よりも高い場合はアップ コントロール リレー RUV、目的階が駐車場の下にある場合はダウン コントロール リレー LVL が含まれます。
かごがコールフロアに到着すると、誘導センサーの ID が放出され、RIS リレーがオフになって接点が開き、RUV または RUN リレーと LS ランプがオフになります (かごは停止します)。 RIS4 接点を閉じることにより、車からの命令を実行するための回路が準備されます。
完全な集合回路では、車の駐車場の床にある接点RIS1とRIS2によって分割された回路は、これらの接点によって遮断されるだけでなく、ブロッキングリレーのアップRBVまたはダウンRBNの接点(それらのコイル)によっても遮断されます。は図には示されていない)、昇圧回路、降圧回路、および順序付け回路は、分離ダイオード D1 ~ D4 によって互いに分離されています。
呼び出しまたは注文ボタンを押す前に、車両の進行方向がまだ選択されていない場合は、駐車フロアの RIS4 接点を除き、方向選択回路内のすべての接点が閉じられます。したがって、これらのボタンが押されると、駐車場の上の階からの呼出信号は中継コイルRUNに接続され、駐車場の下の階からの呼出信号には中継コイルRUVが含まれることになる。方向が選択されると、RUV または LVL リレーと同時に、逆方向遮断リレー RBV または RBN のいずれかがオンになり、その接点による非過渡呼び出し信号のセクション回路を介して出力が遮断されます。
図に示すスキームでは。図2のa、乗客を降ろすために、キャビンは停止せずに会話の最上階まで進み、その後通過停止をしながら下降します。 2、b、乗客を乗せる必要がある場合、キャビンは呼びの最下階まで行き、その後停車しながら上昇します。
検討されているスキームでは、セレクターはリレー要素上に作成されます。これに加えて、カム、光電、連続ブラシ トラッキング、ステッピング、静的要素などの他のセレクターも使用されます。
乗客の流れが多い場合、1 つの廊下に複数のエレベーターが設置され、ペアまたはグループで制御を組み合わせて快適性と出力を向上させます。グループに接続されるエレベータの数は通常 4 台を超えませんが、3 台になることが多くなりますが、1 つのグループに最大 8 台のエレベータを含むシステムも知られています。
グループ制御では、通常、エレベーターの動作には、ピーク上昇、ピーク下降、両方向のバランスのとれた動作という 3 つの主要なモードがあります。エレベータの 1 つまたは別のモードの起動は、ディスパッチャによって、またはエレベータの各グループにインストールされたプログラミング クロックによって自動的に実行されます。
高層ビルでは、エレベーターの各グループはフロアの特定のエリアにサービスを提供するように固定されており、他のフロアにはサービスが提供されません。 1 つのエリアまたは低層の建物にサービスを提供するグループ内に複数のエレベーターがある場合、停止数を減らして平均移動速度を高めるために、偶数階と奇数階に別々のエレベーターを割り当てることができます。
エレベーターのデュアル制御またはグループ制御を行うには、制御回路が集合的である必要があり、両方向の各フロアへの呼び出しは、リレーやトランジスタなどを含む適切な記憶装置によって各方向で個別に登録される必要があります。
第1のエレベータ1PCおよび第2のエレベータ2PCの追加のパーキングリレーを備えたエレベータのペア制御における動作の詳細を反映する例として、図2に示される概略図の一部を検討する。 3.
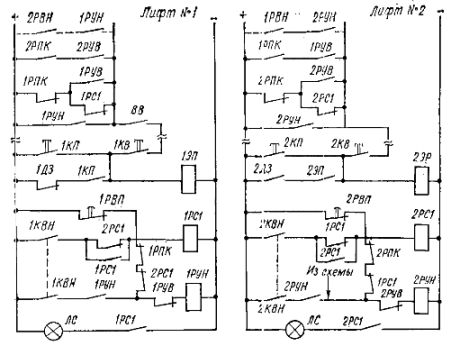
米。 3. ペアエレベーター制御の概略図の一部: ER - フロアリレー、RPK - チャネル切り替えリレー、RVP 自動始動リレー
この場合、1階に乗客を乗せて降下したかごは、他の階からの呼びかけには応答せず、乗客を待つことになる。 1階に車がない場合、命令により上昇して解放された車は自動的に1階に送られ、別の車が降ろされるか駐車されると、最後の1台は飛行終了時に床に残りますまたはローディングセンターへ行き、主に沈下方向の呼び出し運用に使用されます。
1階キャビン到着後、リミットスイッチ1KVN、2KVN(複写機鉱山に設置)より1階キャビンパーキングリレー1PC1、2PC1がONします。これらのリレーはブロックされています。したがって、どちらか一方が含まれているということは、この車両が他方よりも早く 1 階に到着したことを示しています。この場合、リレー 1PC1 または 2PC1 の閉接点により LS 信号灯が点灯し、開接点によりエレベータの呼び出し回路が切断され、かごが 1 階に駐車している間は通話が中断されます。
かごが 1 階から出発すると、LS 信号灯が消灯し、かごが離れた直後にこのエレベーターの呼び出された回路への電源が復旧し、他のエレベーターのかごが 1 階に到着すると、コンピューターリレーがオフになります。オン。このキャビンは 1 階に残り、乗客を待ちます (LS 警告灯が点灯することで合図されます)。秩序を保った車両が解放され、呼び出しがなくなると、リミットスイッチ 1KVN または 2KVN の開放接点を介してリレーコイル 1RUN または 2RUV 1RUN または 2RUV をオンする回路に信号が送信され、車両が1階に行き、t.n.
一般的なシングル、ダブル、およびグループ制御エレベーターのモーター制御装置は、通常、機械室に設置された一般的なパネル、ステーション、または制御ユニットに設置されています。