電気ネットワークにおける遠隔制御
 構造的には、地域または地域規模の電気ネットワークは、相互接続された多数のオブジェクトで構成されます。
構造的には、地域または地域規模の電気ネットワークは、相互接続された多数のオブジェクトで構成されます。
-
人口密集地域の近くにある変電所。
-
送電線。
-
電力の生産と消費のポイント。
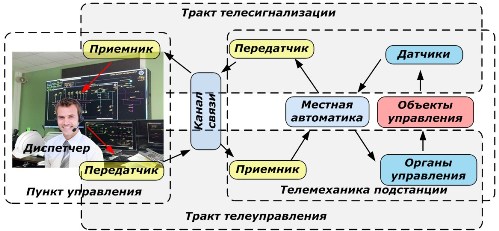
それらの間で行われる技術プロセスの制御は、自動モードで動作する多数の遠隔変電所を担当する指令センターによって実行されます。ただし、実行されるタスクは重要であるため、タスクは常に監視され、必要に応じてディスパッチャによって制御される必要があります。これらの機能は、TU リモート コントロールと車両リモート シグナリングの 2 つのリモート コントロール システムによって実行されます。
リモコンの動作原理
各変電所の開閉装置には、送電線を通じた電力の入出力を切り替える電源スイッチがあります。スイッチの状態は、二次ブロック接点によって繰り返され、中間リレーとロックリレーによって繰り返され、その位置は信号電気機械回路で使用されます。これらはセンサーとして機能し、スイッチングデバイスと同様に、「オン」と「オフ」の 2 つの意味を持ちます。
テレメカニクスの動作原理
各変電所にはローカル信号システムがあり、 電気スタッフライトパネルを点灯し、音声信号を発することにより、電気回路の状態に関する機器の作業を実行します。しかし、変電所は長期間無人で稼働しており、勤務中の通信指令員に稼働状況を知らせるために電気信号システムが使用されています。
スイッチ位置には、バイナリ コード値«1»または«0»のいずれかが割り当てられ、ローカル オートメーションによって、接続されているトランスミッタに送信されます。 コミュニケーションチャネル (ケーブル、電話、ラジオ)。
通信チャネルの反対側には、制御ポイントと電力設備の受信機があり、送信機から受信した信号を処理し、指令担当者がアクセスできる情報の形式に変換します。彼らによると、変電所の状態は評価中だという。
ただし、多くの場合、このデータは不十分です。したがって、テレシグナリングは TI テレメトリ システムによって補完され、これに従って主電力、電圧、電流計の測定値もコントロール パネルに送信されます。その構造上、TI 回路はテレメカニクス キットに含まれています。
ディスパッチャーは、遠隔制御という手段で、離れた変電所からの配電に影響を与える能力を持っています。このために、ディスパッチャーは、制御ポイントから通信チャネルにコマンドを発行する独自の送信機を持っています。伝送パスの反対側では、コマンドが受信機によって受信され、ローカル オートメーションに送信され、電源スイッチを切り替える制御が作動します。
遠隔機械システムは SDTU と通信サービスによってサービスされ、ローカル オートメーション サービスは SRZA によって提供されます。
リモートコントロールコマンドの種類
ディスパッチャーの送信機によって変電所の制御本体に送信される信号は、強制的な実行が必要なコマンドとみなされます。
注文は次の宛先にのみ送信できます。
-
変電所(スイッチ)の別個のオブジェクト。
-
異なる変電所内のデバイスのグループ。たとえば、特定の情報を提供するために情報を設定する遠隔機械コマンド。
リモコン使用の特徴
プロビジョニング要件は、リモート スイッチング ポイントからディスパッチャーによって実行されるタスクに課せられます。
-
取り組みを急速に加速することで消費者への電力供給の信頼性を高める。
-
電気使用時の安全基準の維持。
リモート制御によって接続をオンにする前に、ディスパッチャは、リモート変電所の回路ブレーカーをオフにすることができることを考慮します。
-
自動再閉路(再閉路)による試行スイッチオン後の事故の進展を防止するための保護機能による。
-
操作員は、ローカルまたはリモートのポイントから変電所で作業することができます。
いずれの場合も、回路をオンにする前に、安全規則に従い、負荷をオンにするための回路の準備が整っているかどうかについて訓練を受けた電気技術者によって収集された信頼できる情報を取得する必要があります。
場合によっては、個々の作業者が、リモートの 6 ÷ 10 kV 接続で発生した短絡の検索を迅速化するために、特定の消費者の一部を切断した後、負荷がかかった状態で回路ブレーカーをオンにするという「間違い」を犯してしまうことがあります。この方法では、故障箇所の特定に失敗した場合、回路内で再び短絡が発生し、機器の負荷、潮流、その他の通常モードからの逸脱が増加します。

テレコントロールとテレシグナリングの相互作用
リモート コントロール コマンドは、ディスパッチャーによって準備段階と実行段階の 2 段階で送信されます。これにより、アドレスとアクションを入力するときに発生する可能性のあるエラーがなくなります。送信機を起動してコマンドを最終的に送信する前に、オペレーターは自分が入力したデータを確認する機会があります。
TU コマンドの各アクションは、リモート オブジェクトの実行本体の特定の位置に対応しており、リモート シグナリングによって確認され、ディスパッチャによって受け入れられる必要があります。車両からの信号は、受信ポイントで確認されるまで再送信されます。
テレメカニクスにおける確認応答 - 実行される操作。オペレーターは信号を観察して信号の受信を確認し、それをニーモニック ダイアグラムにロックします。記憶図上に再出現する信号は、制御対象の状態変化(例えば、警告灯の点滅)や対象の警告装置(記号)の状態の位置のずれに操作者の注意を喚起する。確認の結果、信号装置は制御対象の新しい状態に対応する位置を取る必要がある。
確認方法には、個別のハンドシェイク キーを使用する個別方法と、確認ボタンを使用してすべての信号に共通の一般方法の 2 つの方法があります。後者の場合、確認応答スキームは一連の個別のハンドシェイク リレーを使用して実装されます。信号装置の方式では、確認キーまたはリレーの接点は、監視対象の状態を繰り返す信号リレーの接点と非対応の原則に従って接続されます。
場合によっては、さまざまな理由により TR コマンドが実行されないことがあります。リモート コントロール システムは、それを「記憶」して再度複製する必要はありません。追加の操作はすべて、損傷の原因を特定し、制御オブジェクトの状態を確認した後に実行されます。
通信チャネルの技術的状態は、機器によって常に監視されなければなりません。送信機によって車両を介して送信されたメッセージは、歪みなく受信される必要があります。通信チャネルで発生する干渉によって情報の信頼性が低下することがあってはなりません。

情報の信頼性
テレシグナリングから送信されたすべてのメッセージは、コントロール センターで受信が確認されるまで、機器のメモリに保存されます。通信チャネルが切断された場合は、回復後に自動的に送信されます。
TC コマンドを遠隔の変電所に送信する場合、動作環境に変化が生じ、コマンドを受信したことで機器に望ましくない動作が発生したり、コマンドの意味がなくなったりする場合があります。したがって、このような場合には、TC コマンドの前に、TS メッセージの優先アクションが自動化アルゴリズムに入力されます。
テレメカニクス機器は従来のアナログベースのデバイスを使用または使用できます デジタル技術… 2 番目のバージョンでは、機器の機能が大幅に拡張されるとともに、通信チャネルのノイズ保護が強化されています。