金属切断機の補助駆動用電気モーターの選択
 工作機械の補助ドライブ (キャリパー、ヘッド パッド、クロス アームなどのクイック ドライブ) は通常、短時間負荷モードで動作します。電気駆動装置に含まれるすべてのデバイスの温度が動作中に定常値に達せず、停止中に周囲温度まで低下するような持続時間の電気駆動装置の動作モードは、短期と呼ばれます。
工作機械の補助ドライブ (キャリパー、ヘッド パッド、クロス アームなどのクイック ドライブ) は通常、短時間負荷モードで動作します。電気駆動装置に含まれるすべてのデバイスの温度が動作中に定常値に達せず、停止中に周囲温度まで低下するような持続時間の電気駆動装置の動作モードは、短期と呼ばれます。
金属切断機の補助ドライブの稼働時間は通常短いです。 5 ~ 15 秒を超えることはなく、重いマシンの場合のみ 1 ~ 1.5 分に達します。この間 (t < 0.1T)、許容範囲内の過負荷では、電気モーターは通常の過熱に至るまで加熱する時間がありません。この場合の電動機の定格出力は過負荷条件によって決まります。
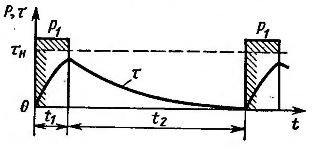
米。 1. 短期運転時の負荷曲線
補助駆動装置の動作中の抵抗モーメント Mc は主に摩擦力によって生成されるため、これらの駆動装置は主動作の駆動装置とは異なり、かなりの始動トルクを必要とします。
水平方向に動く機械要素を動かすときに摩擦力に打ち勝つために消費される電力:

ここで、Ftp — 摩擦力、N; v — 速度、m/s; G — 移動するユニットの重力 (重量)、N; μ — 運動の摩擦係数。
モーター軸動力 P = Ptr /η、
ここで、η — c. P.D. 透過率、通常 η = 0.1 — 0.2。
考慮されたモードでの動作中の電気モーターの加熱は重要ではありません。したがって、許容過負荷を使用することをお勧めします。
定格電力 Pn = Ptr /(λη)、
ここで、 λ — 許容過負荷の係数。
おおよそ、エンジンの作動部分の特性が明らかであると考えられます。次に、過負荷運転時のモータの角速度
ωλ = ωО (1 — λсн)、
ここで、 ωО = (πнО)/30 - 電気モーターの同期角速度。
式 Pn = Ptr /(λη) を使用して、モーターの過負荷トルクを求めます。
エンジン始動時の抵抗モーメントは作動中よりも大きくなります。この瞬間
ここで、μО — 静止摩擦係数。
機械の補助ドライブの電気モーターを選択する手順
まず、式 Pn = Ptr /(λη) を使用して電動機をカタログから選択し、起動トルク Mnach を決定します。モーメント Mso を計算式で計算し、モーメント Mnach と比較します。0.85 Mnig> Mso の場合、選択したモーターは補助ドライブに適しています。
機械ユニットの回転および持ち上げのための駆動も同様の方法で計算されますが、後者の場合のみ、主な負荷は移動するユニットの重力 (重量) によって生成されることがよくあります。
工具をワークピースに素早く近づけるために最適な速度を選択することが特に重要です。工具に近づくと、高速動作が切削速度での低速動作に変わります。この速度の変化は、ツールがパーツからある程度の距離にある場合に発生します。そうでない場合、ツールは高速でパーツに衝突し、破損します。
ある速度から別の速度への移行には時間がかかります。この間、電気機器は動作し高速で動作し続けますが、電圧変動やその他のランダム要因の影響により機器の応答時間は変化します。
最適な速度は、運動チェーン内のギアを適切に選択することによって提供されます。道路の最終セクションの速度を徐々にまたは滑らかに自動的に減速することで、さらなる時間の短縮が可能になり、より高い初速度を採用することが可能になります。