誘導電動機の機械的特性
 モータの機械的特性は、ロータ速度の軸モーメント依存性 n = f (M2) と呼ばれます...負荷時は空転モーメントが小さいため、M2 ≈ M となり、機械的特性は依存性 n で表されます。 = f (M)... s = (n1 — n) / n1 の関係を考慮すると、機械的特性は座標 n と M のグラフ依存性を表すことによって取得できます (図 1)。
モータの機械的特性は、ロータ速度の軸モーメント依存性 n = f (M2) と呼ばれます...負荷時は空転モーメントが小さいため、M2 ≈ M となり、機械的特性は依存性 n で表されます。 = f (M)... s = (n1 — n) / n1 の関係を考慮すると、機械的特性は座標 n と M のグラフ依存性を表すことによって取得できます (図 1)。
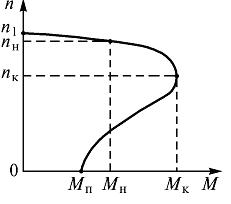
米。 1. 誘導電動機の機械的特性
 非同期モーターの自然な機械的特性は、その組み込みの基本 (パスポート) スキームと電源電圧の公称パラメーターに対応します。抵抗、リアクトル、コンデンサなどの追加要素が含まれる場合、人工的な特性が得られます。モーターに公称電圧が供給されている場合も、その特性は本来の機械的特性とは異なります。
非同期モーターの自然な機械的特性は、その組み込みの基本 (パスポート) スキームと電源電圧の公称パラメーターに対応します。抵抗、リアクトル、コンデンサなどの追加要素が含まれる場合、人工的な特性が得られます。モーターに公称電圧が供給されている場合も、その特性は本来の機械的特性とは異なります。
機械的特性は、電気駆動装置の静的および動的モードを分析するための非常に便利で役立つツールです。
誘導電動機の機械的特性の計算例
三相かご型誘導電動機には、= 50 Hz で = 380 V の電圧がネットワークから供給されます。エンジンパラメータ: Pn = 14 kW、нn = 960 rpm、cosφн= 0.85、ηн= 0.88、最大トルク km = 1.8 の倍数。
固定子巻線の定格相電流、極対の数、定格スリップ、定格シャフトトルク、臨界トルク、臨界スリップを決定し、モーターの機械的特性を構築します。
答え。ネットワークから消費される公称電力
P1n =Pn / ηn = 14 / 0.88 = 16 kW。
ネットワークが消費する公称電流

極対の数
p = 60 f / n1 = 60 × 50/1000 = 3、
ここで、n1 = 1000 — 公称周波数 нn = 960 rpm に最も近い同期速度。
公称滑り
сн = (n1 — нн) / n1 = (1000 — 960 ) / 1000 = 0.04
モータ軸定格トルク
重大な瞬間
Mk = km x Mn = 1.8 x 139.3 = 250.7 N·m。
M = Mn、s = sn、Mk / Mn = kmを代入して臨界滑りを求めます。

エンジンの機械的特性を描くには、n = (n1 — s) を使用して特性点を決定します。アイドリング点 s = 0、n = 1000 rpm、M = 0、公称モード点 сn = 0.04、нn = 960 rpm、Mn = 139.3 N・m、臨界モード点 сk = 0.132、нk = 868 rpm、Mk = 250.7 N・m。
n = 1、n = 0 の作動点については、次のようになります。
得られたデータを基に機械特性エンジンを構築します。機械的特性をより正確に構築するには、設計点の数を増やし、特定のスライドのモーメントと回転周波数を決定する必要があります。
