位相計 - 目的、種類、装置、動作原理
 電気測定装置は位相計と呼ばれ、その機能は一定周波数の 2 つの電気振動の間の位相角を測定することです。たとえば、フェーザ メーターを使用すると、三相電圧ネットワークの位相角を測定できます。位相計は、電気設備の力率 (コサイン ファイ) を決定するためによく使用されます。したがって、位相計は、さまざまな電気および電子デバイスおよび装置の開発、試運転、および操作に広く使用されています。
電気測定装置は位相計と呼ばれ、その機能は一定周波数の 2 つの電気振動の間の位相角を測定することです。たとえば、フェーザ メーターを使用すると、三相電圧ネットワークの位相角を測定できます。位相計は、電気設備の力率 (コサイン ファイ) を決定するためによく使用されます。したがって、位相計は、さまざまな電気および電子デバイスおよび装置の開発、試運転、および操作に広く使用されています。
フェーザが被測定回路に接続されると、デバイスは電圧回路と電流測定回路に接続されます。三相電源ネットワークの場合、フェーザは電圧によって三相に接続され、電流によって同じく三相の変流器の二次巻線に接続されます。
位相計のデバイスに応じて、電圧によって3相に接続され、電流によって2相のみに接続される場合、その接続の簡素化されたスキームも可能です。次に、3 番目の位相は、2 つの電流 (測定された 2 つの位相) のみのベクトルを加算することによって計算されます。位相計の目的 — コサインファイ測定 (力率) であるため、通常の言語では「コサインメーター」とも呼ばれます。
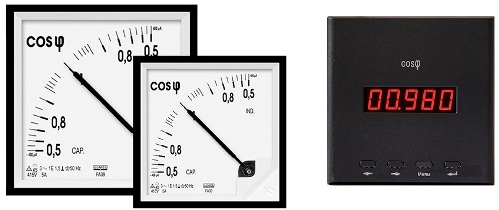
現在、動電型とデジタルの 2 つのタイプの位相計があります。電気力学的または電磁位相計は、位相シフトを測定するための比例機構を備えた単純な方式に基づいています。相互にしっかりと取り付けられた 2 つのフレーム (その間の角度は 60 度) がサポート内の軸に固定されており、対抗する機械的モーメントはありません。
これら 2 つのフレームの回路内の電流の位相シフトと、これらのフレームの相互の取り付け角度を変更することによって設定される特定の条件下では、測定装置の可動部分が等しい角度だけ回転します。位相角に。デバイスのリニアスケールにより、測定結果を記録できます。
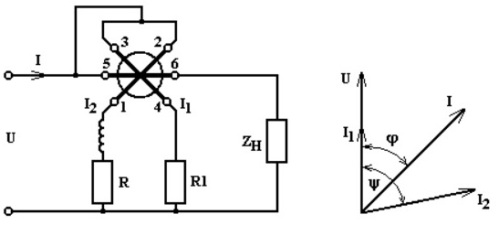
動電位相計の動作原理を見てみましょう。電流 I の固定コイルと 2 つの可動コイルがあります。各可動コイルには電流 I1 と I2 が流れます。流れる電流により、固定コイルと可動コイルの両方に磁束が発生します。したがって、コイルの磁束の相互作用により、2つのトルクM1、M2が発生する。
これらのモーメントの値は、2 つのコイルの相対位置、測定装置の可動部分の回転角度に依存し、これらのモーメントは反対方向に向けられます。モーメントの平均値は、可動コイルに流れる電流(I1およびI2)、固定コイルに流れる電流(I)、および可動コイルの電流の位相シフト角に依存します。固定コイル (ψ1 および ψ2 ) および設計パラメータの巻線に流れる電流。
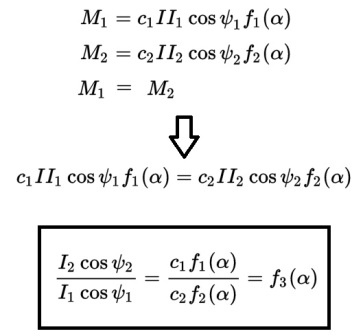
その結果、装置の可動部分は、回転によって生じるモーメントが等しくなることによって平衡が生じるまで、これらのモーメントの作用を受けて回転します。位相計のスケールは力率に関して校正できます。
動電位相計の欠点は、測定値が周波数に依存することと、調査対象のソースからのエネルギーが大幅に消費されることです。
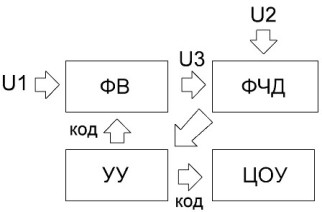
デジタル位相計はさまざまな方法で実装できます。たとえば、補償位相計は手動モードで動作しても高い精度を持っていますが、その仕組みを考慮してください。 2 つの正弦波電圧 U1 と U2 があり、それらの間の位相シフトを知る必要があります。
電圧 U2 は移相器 (PV) に供給され、制御ユニット (UU) からのコードによって制御されます。 U3 と U2 の間の位相シフトは、U1 と U3 が同位相になる状態に達するまで徐々に変更されます。 U1 と U3 の間の位相シフトの符号を調整することにより、位相感知検出器 (PSD) が決定されます。
位相感知検出器の出力信号は、制御ユニット (CU) に供給されます。バランシング アルゴリズムはパルス コード方式を使用して実装されます。平衡化プロセスが完了すると、位相シフト係数 (PV) コードは U1 と U2 の間の位相シフトを表します。
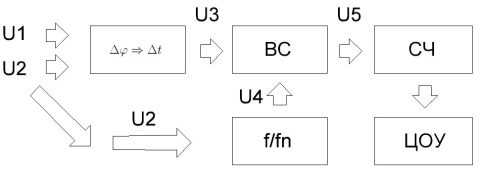
最新のデジタル位相計の大部分は、離散計数の原理を使用しています。この方法は 2 つのステップで機能します。位相シフトを特定の持続時間の信号に変換し、次に離散数値を使用してこのパルスの持続時間を測定します。このデバイスには、位相パルス変換器、時間セレクター (VS)、離散整形パルス (f / fn)、カウンター (MF)、および DSP が含まれています。
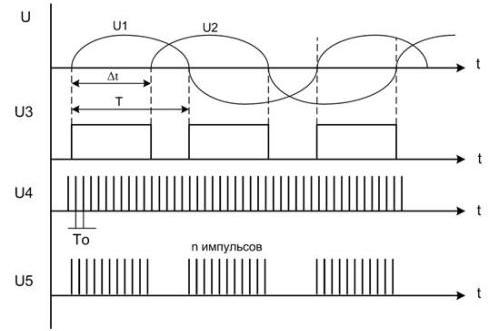
位相パルス変換器は、位相シフト Δφ を持つ U1 と U2 から形成されます。 方形パルス シーケンスとしての U3。これらのパルス U3 は、入力信号 U1 および U2 の周波数と時間オフセットに対応する繰り返し率とデューティ サイクルを持っています。パルス U4 と U3 は、時間セレクターに印加される周期 T0 の個別の検出パルスを形成します。時間セレクターは、U3 パルスの持続時間の間開き、U4 パルスを繰り返します。時間セレクターの出力の結果、パルス U5 のバーストが得られ、その繰り返し周期は T です。
カウンタ (MF) はシリアル パケット U5 内のパルスの数をカウントします。その結果、カウンタ (MF) で受信したパルスの数は U1 と U2 の間の位相シフトに比例します。カウンターからのコードは中央制御センターに送信され、装置の測定値は 10 分の 1 の精度で度単位で表示されますが、これは装置の裁量によって実現されます。離散誤差は、1 パルス カウント期間の精度で Δt を測定できるかどうかに関係します。
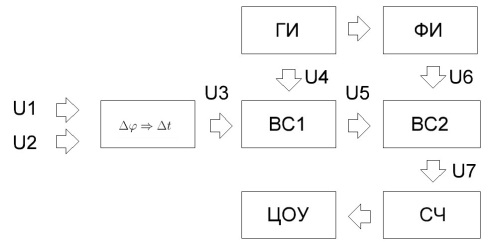
デジタル コサイン ファイ平均化電子位相計は、テスト信号の複数の周期 T にわたって平均化することによって誤差を減らすことができます。デジタル平均位相計の構造は、パルス ジェネレータ (GP) とディスクリート パルス ジェネレータ (PI) に加えて、もう 1 つのタイム セレクタ (BC2) の存在により、ディスクリート回路数とは異なります。
ここで、移相コンバータU5は、パルス発生器(PI)および時間セレクタ(BC1)を含む。 T よりはるかに長い校正期間 Tk の間、いくつかのパケットがデバイスに供給され、その出力でいくつかのパケットが形成されます。これは結果を平均するために必要です。
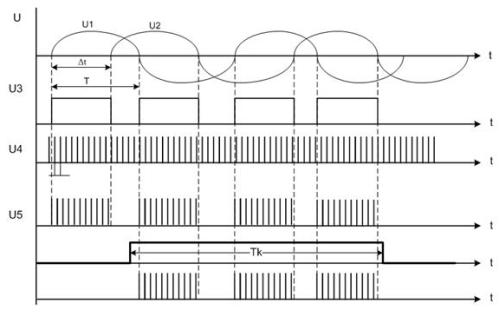
パルス整形器 (PI) は周波数を所定の係数で分割する原理に基づいて動作するため、U6 パルスの持続時間は T0 の倍数になります。信号 U6 のパルスにより時間セレクター (BC2) が開きます。その結果、いくつかのパケットが入力に到着します。 U7 信号は、中央制御センターに接続されたカウンター (MF) に供給されます。デバイスの解像度は U6 のセットによって決まります。
位相計の誤差は、信号 U2 と U1 がゼロを通過する瞬間の時間間隔中にコンバーターによって位相シフトを修正する精度が低いことにも影響されます。しかし、これらの不正確さは、研究対象の入力信号の周期よりもはるかに長い周期 Tk の計算結果を平均すると減少します。
この記事が、位相計の仕組みについて一般的な理解を得るのに役立つことを願っています。より詳細な情報は特別な文献でいつでも見つけることができます。幸いなことに、今日ではそのような文献がインターネット上にたくさんあります。