交流電気機械の固定子および回転子巻線
電気製品 (デバイス) の巻線 — 磁場を生成または使用するか、電気製品 (デバイス) の所定の抵抗値を取得するように設計された、特定の方法で配置され接続された一連のコイルまたはコイル。電気製品(デバイス)のコイル — 別の構造単位として作られた電気製品(デバイス)のコイルまたはその一部(GOST 18311-80)。
この記事では、交流電気機械の固定子巻線と回転子巻線の装置について説明します。
固定子巻線の空間配置:
 かご型ローター:
かご型ローター:
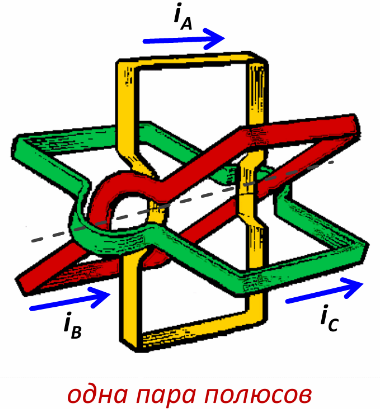
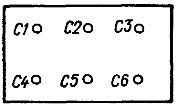
12 個のスロットを備え、各スロットに 1 本のワイヤが敷設されているステータを図に概略的に示します。 1、a.撚線導体間の接続は、3 つの相のうち 1 つについてのみ示されています。コイルの相 A、B、C の始まりには C1、C2、C3 のマークが付けられています。終わり — C4、C5、C6。チャネル内に配置されたコイルの部分 (コイルの活性部分) は通常ロッドの形で示され、溝内のワイヤ間の接続 (端部接続) は実線で示されます。
ステータコアは中空円筒の形状をしており、電磁鋼板で作られた 1 つまたは複数のスタック (通気ダクトによって分離されている) です。小型および中型の機械では、各シートは内周に沿って溝のあるリングの形でスタンプされます。図では。図1のbには、使用される形態のうちの1つの溝を有するステータシートが示されている。
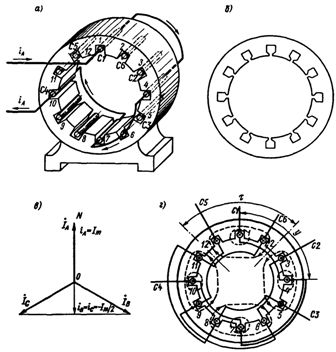
米。 1. ステーターのスロット内の巻線の位置とワイヤー内の電流の分布
ある時点における第 1 相の電流 iA の瞬時値が最大であり、電流が相の開始点 C1 から終了点 C4 に向かうとします。この電流をプラスであると考えます。
固定軸 ON 上の回転ベクトルの投影として各相の瞬間電流を決定すると (図 1、c)、特定の瞬間における B 相と C 相の電流は負、つまり、右方向であることがわかります。フェーズの終わりから始まりまで。
それを図でたどってみましょう。 1d 回転磁場の形成。問題の瞬間、A 相の電流は最初から最後まで向いています。つまり、ワイヤ 1 と 7 で図面の平面の外側に出た場合、ワイヤ 4 と 10 では平面の後ろに流れます。図面を当社にお送りください(図 1、a および d を参照)。
フェーズ B では、この時点の電流はフェーズの終わりからフェーズの始まりまで流れます。最初のサンプルに従って 2 番目の相のワイヤを接続すると、B 相の電流がワイヤ 12、9、6、3 を通過することがわかります。同時に、電流はワイヤ 12 と 6 を通って図面の平面の外に出て、ワイヤ 9 と 3 を通って私たちに到達します。 B 相のサンプルを使用して、C 相の電流分布の画像を取得します。
電流の方向は図に示されています。 1、d;破線は、固定子電流によって生成される磁力線を示します。線の方向は右ねじの法則によって決まります。この図から、ワイヤは同じ電流方向を持つ 4 つのグループを形成し、磁気システムの 2p 極の数は 4 つであることがわかります。磁力線がステータから出るステータの領域はN極であり、磁力線がステータに入る領域はS極である。 1 つの極が占めるステータ円の円弧は、極分離と呼ばれます。
固定子の円周上の異なる点の磁場は異なります。ステータの円周に沿った磁界分布のパターンは、2 極の分離ごとに周期的に繰り返されます (円弧角 2 は電気角 360 度とみなされます)。固定子の円周に p 個の二重極分割があるため、360 の幾何学的角度は 360p の電気角度に等しく、1 つの幾何学的角度は p の電気角度に等しくなります。
図では。 1d は、ある一定の瞬間の磁力線を示しています。連続したいくつかの瞬間の磁場の画像を見ると、磁場が一定の速度で回転していることが確認できます。
場の回転速度を求めてみましょう。交流の周期の半分に等しい時間が経過すると、すべての電流の方向が反転します。これにより、磁極が反転します。つまり、周期の半分で磁場が 1 回転の何分の 1 だけ回転します。固定子の磁界の回転速度、つまり同期速度は (回転数/分) です。

極対の数 p は整数のみであるため、たとえば 50 Hz の周波数では、同期速度は 3000 に等しくなります。 1500; 1000rpmなど
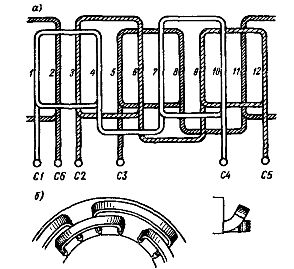
米。 2. 三相単層巻線の詳細図
交流機の巻線は 3 つのグループに分類できます。
1) リールツーリール。
2)コア。
3)特別な。
特殊なコイルには次のものがあります。
(a) かご型の短絡。
b) 異なる極数に切り替える非同期モーターの巻線。
c) アンチコネクションを備えた非同期モーターの巻線など。
上記の区分に加えて、コイルは次のような他の多くの特性でも異なります。
1) 実行の性質による - 手動、パターン化、および半パターン化。
2)溝内の位置による - 単層と二層。
3) 極および相ごとのスロット数による - 極および相ごとに整数 q のスロットを持つ巻線と、分数 q を持つ巻線。
コイルは、直列に接続された 2 本のワイヤによって形成される回路です。セクションまたは巻線は、2 つのスロットに配置され、本体から共通の絶縁が施された、直列に接続された一連の巻線です。
このセクションには 2 つのアクティブな側面があります。左側のアクティブな側はセクション (コイル) の開始点と呼ばれ、右側はセクションの終了点と呼ばれます。セクションのアクティブな側面間の距離はセクション ピッチと呼ばれます。これは、突起の数または極の分割部分のいずれかによって測定できます。
セクションのピッチが極の分割に等しい場合、セクションのピッチは直径と呼ばれ、極の分割より小さい場合は切り捨てと呼ばれます。これは、セクションのピッチが極の分割より大きくないためです。
コイルの動作を決定する特性量は、極および相ごとのスロット数です。 1 つの極分割内の各相の巻線が占めるスロットの数:

ここで、z はステーター スロットの数です。
図に示すコイル。 1、a には次のデータがあります。

この最も単純なコイルであっても、ワイヤとその接続の空間図は複雑であることが判明するため、通常は、巻線が円筒面ではなく平面 (円筒面) 上に描かれる展開図に置き換えられます。溝とコイルを備えた表面は「平面内で展開」されます)。図では。図2は、検討中の固定子巻線の詳細図である。
前の図では、簡単にするために、スロット 1 と 4 に配置された巻線の相 A の一部が 2 本のワイヤ、つまり 1 巻のみで構成されていることを示しました。実際、1 つの極にかかる巻線の各部分は w ターンで構成されます。つまり、溝の各ペアに w ワイヤが配置され、1 つの巻線に結合されます。したがって、拡張スキームに従ってバイパスする場合、たとえばスロット 1 の相 A をバイパスする場合、スロット 7 に移動する前にスロット 1 と 4 を w 回バイパスする必要があります。 1 つの巻線または巻線ステップのターンの側面間の距離, y を図に示します。 1、d;通常はチャネル数で表されます。
米。 3. 非同期マシンシールド
図に示されています。図1と図2に示すように、固定子巻線は各溝に1層ずつ収まるので単層と呼ばれ、交差する前部を平面上に配置するために、異なる面で曲げられます(図2、b)。単層巻線は、極の間隔に等しいステップで作成されます (図 2、a)。または、y> 1 の場合、このステップは、同じ相の異なる巻線の極の間隔に平均して等しくなります。 y< 1... 現在では二層コイルの方が一般的です。
巻線の 3 相のそれぞれの開始と終了は、6 つのクランプがある機械パネルに表示されます (図 3)。三相ネットワークの 3 本の直線ワイヤは、上部端子 C1、C2、SZ (相の開始点) に接続されます。下部クランプ C4、C5、C6 (位相の端) は 2 つの水平ジャンパで 1 点に接続されるか、これらのクランプのそれぞれが垂直ジャンパに接続され、その上に上部クランプが配置されます。
最初のケースでは、ステーターの 3 つの相はスター結線を形成し、2 番目のケースではデルタ結線を形成します。たとえば、ステーターの 1 つの相が 220 V の電圧に設計されている場合、ステーターがデルタ接続されている場合、モーターが接続されているネットワークの線間電圧は 220 V でなければなりません。スターに接続されている場合、グリッド線の電圧は次のようになります。
ステーターがスター型に接続されている場合、モーターはネットワークに対して対称的な負荷であるため、中性線は通電されません。
誘導機のローターは、シャフトまたは特殊な支持構造上に絶縁された電気鋼の打ち抜きシートで作られています。ステータとロータの間の半径方向の隙間は、機械の両方の部分を貫く磁束の経路における抵抗を低く抑えるために、可能な限り小さくされています。
技術的要件で許容される最小ギャップは、機械の出力と寸法に応じて、10 分の 1 ミリメートルから数ミリメートルです。回転子巻線の導体は、回転子巻線と回転磁界との接触を最大限にするために、回転子表面に直接形成される回転子に沿ったスロット内に配置されています。
誘導機は、相ローターとかご型ローターの両方を使用して製造されています。

米。 4. フェーズローター
相回転子には通常、固定子巻線と同じ極数の 3 相巻線があります。巻線はスター型またはデルタ型に接続されます。コイルの 3 つの端は、機械のシャフトとともに回転する 3 つの絶縁されたスリップ リングに導かれます。機械の静止部分に取り付けられスリップ リング上を滑るブラシを介して、三相の始動または調整レオスタットがローターに接続されます。つまり、ローターの各相にアクティブ抵抗が導入されます。フェーズロータの外観を図に示します。図4では、シャフトの左端に3つのスリップリングが見える。巻線ローターを備えた非同期モーターは、駆動機構の速度のスムーズな調整が必要な場合や、負荷がかかっているモーターの頻繁な始動に使用されます。
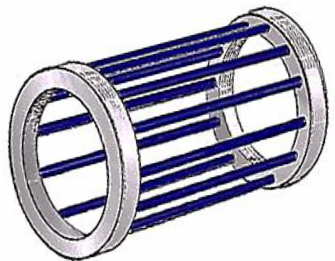
かご形回転子の設計は、位相回転子の設計よりもはるかに単純です。図1の設計の1つについては、次のようになる。図5aは、ロータコアが組み立てられるシートの形状を示す。この場合、各シートの外周近くの穴がコア内に縦方向のチャネルを形成します。アルミニウムがこれらのチャネルに注がれ、凝固した後、ローター内に縦方向の導電性ロッドが形成されます。ローターの両端でアルミニウム リングが同時に鋳造され、アルミニウム ロッドが短絡されます。結果として得られる導電システムは、一般にリスセルと呼ばれます。

米。 5. リスセルローター
かご形回転子を図に示します。 5B. ローターの端では、換気ブレードが短いカップリング リングと同時に鋳造されているのが見られます。この場合、スロットはローターに沿って 1 つの分割ごとに面取りされます。かご型はシンプルで、摺動接点がないため、三相非同期かご型モーターが最も安価で、最もシンプルで、最も信頼性が高くなります。それらが最も一般的です。