誘導近接スイッチの動作原理、種類と使用例
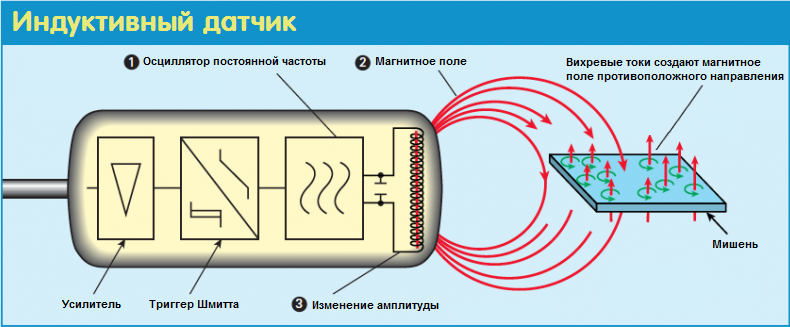
非接触誘導スイッチ (近接センサー) は、さまざまな産業目的で物体の自動非接触検出に使用されます。それらの動作原理は、センサーの動作領域への特定のサイズの強磁性、磁性、または金属の物体の導入に関連する発電機の振動振幅の変化の現象に基づいています。
センサーがオンになると、その作動領域に交流磁場が作用し、この領域に金属が導入されると、ターゲットはこの金属に向けられます。 渦電流 発生器の初期振動振幅に変化が生じますが、変化の大きさは金属物体とセンサーの間の距離に依存します。アナログ信号の対応する値はフリップフロップによって論理信号に変換され、ヒステリシス値とスイッチング レベルが決まります。

ここでのスイッチ自体は、観測対象物の位置に応じて特定の外部トリガー回路の状態を制御する半導体コンバータであり、センサーとの機械的接触なしに対象物の位置が決定されます。
おそらくすでにお気づきかと思いますが、ここでのセンシティブな要素は次のとおりです。 インダクタ、その磁気回路は作業領域の方向に開いています。
誘導リミットスイッチは大きなグループに属します 機構の位置を検出する非接触センサー、現代の自動システムでは非常に一般的です。
特定のオートメーション システムの誘導近接スイッチは、機器の特定の項目の位置を監視するための主要ツールとして機能し、製品カウンター、モーション コントローラー、警報システムなど、機器の目的に応じて信号が処理されます。などn。 。
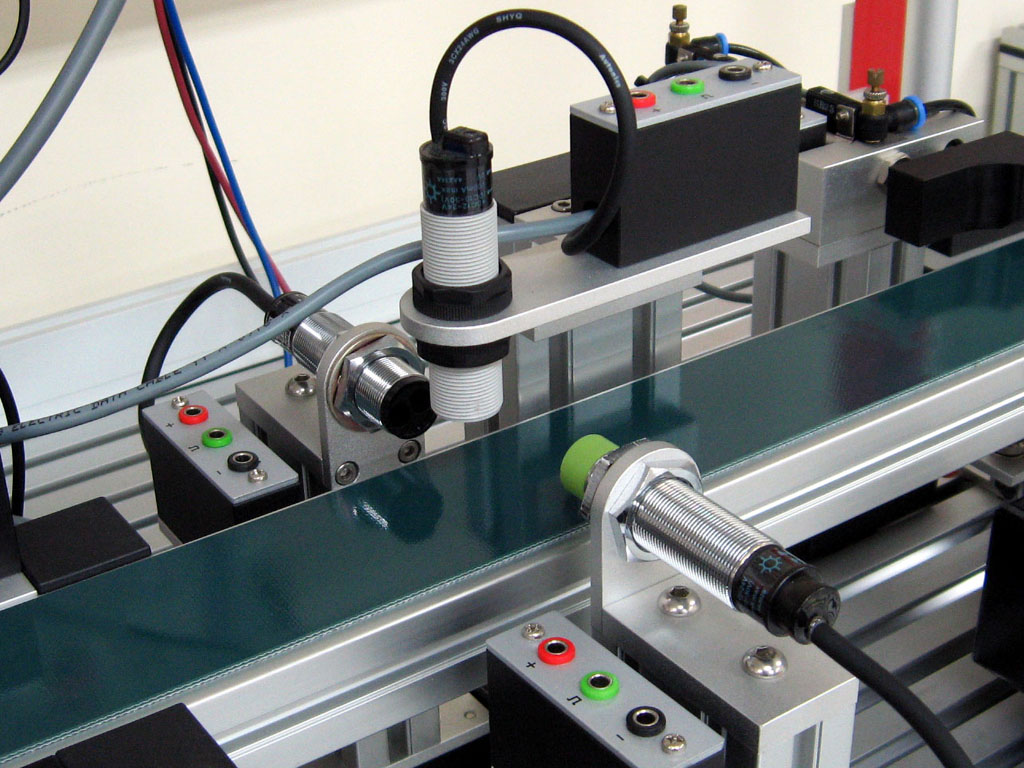
特に、誘導近接スイッチは、金属物体を数えてその位置を追跡するためによく使用されます。たとえば、ボトルがコンベアに沿って移動し、そのキャップで数が数えられたり、組立工場では、カウンターやフランジの後に工具交換が行われます。誘導センサーの範囲内にあります。 …
スイッチの動作プロセスは次のように説明できます。動作状態では、非接触センサーの動作面の前で一定の振幅の磁場がパルスします。
金属がセンサーに近づくと (たとえば、ボトルのブリキの蓋やロボットのアセンブリに含まれる部品の一部など)、磁場の振動が弱まる傾向があり、それに応じて磁場の値が弱まります。復調された電圧が低下すると、トリガがかかり、スイッチング素子が切り替わるまで(たとえば、カウンタが作動するまで、またはツールが交換されるまで)続きます。
十分なサイズのすべての金属物体 (シャフトの突起、フランジ、鋼板、カップリング ボルトの頭など) は、非接触誘導スイッチの制御または計数オブジェクトとして機能します。

制御回路の転流原理とその接続方法に応じて、誘導センサーにはワイヤの数が異なるいくつかの種類が用意されています。センサーは NPN または PNP スイッチに基づいて構築されており、ノーマルクローズまたはノーマルオープンにすることができます。
2 線 - 負荷回路に直接接続され、負荷回路を通じて電力が供給されます。ここでは、極性と公称負荷抵抗を観察することが非常に重要です。そうしないと、センサーが正しく動作しません。
3 線式スイッチが最も一般的で、2 つの線で電力が供給され、3 番目の線はスイッチ負荷の接続に使用されます。
最後に、4 線式スイッチにはスイッチング モード (ノーマル クローズまたはノーマル オープン) を選択する機能があります。
最新の自動システムにおけるもう 1 つの一般的なタイプの位置センサー: 光近接スイッチ