光近接スイッチ
光学式近接スイッチ (センサー) は、現在、さまざまな物体の位置決め、計数、および単純な検出に機器が使用される多くの業界で広く使用されています。センサー回路でコーディングを使用すると、センサー回路に対する光源の外部影響を回避できるため、誤警報から保護できます。サーマルハウジング内のセンサーは、低温で動作するように設計されています。
これらのデバイスは、受光器に当たる光束の変化に応答する電子回路であり、これにより、空間の特定の領域における物体の有無が記録されます。光源から発せられる光をエンコードすると (空間選択と変調)、効率が向上し、前述したように干渉の影響が打ち消されます。
構造的に、センサー システムには、放射線源とその受信器という 2 つの主要な機能ブロックが含まれています。これらは、特定のセンサー (スイッチ) の動作原理に応じて、2 つの別々のハウジングにすることも、両方のブロックに対して 1 つのハウジングにすることもできます。
ソースまたはエミッターは、ジェネレーター、エミッター、インジケーター、光学システム、ハウジングの部品で構成されており、その内側にはジョイントで保護された回路があり、外側には固定に必要なすべてのものがあります。ジェネレータのタスクは、送信機用の一連の信号パルスを生成することです。
エミッタ自体は LED です。 LEDの発光パターンは光学系によって形成されます。インジケーターはセンサーへの電力の有無を示します。ハウジングは外部の機械的影響から保護し、センサーを使用する場所に簡単に設置できるようにします。
一方、受信機には、受信機の指向性パターンを形成して選択を行う光学システムも備えています。機能する光検出器 フォトトランジスタ放射線を感知して電気信号に変換します。ヒステリシスを伴う信頼性の高いスロープを提供する閾値要素を備えた増幅回路。負荷を切り替える電子スイッチと、周囲の背景に対して物体がはっきりと記録されるように受信機の感度を調整するレギュレーターです。
ここには 2 つのインジケーターがあります。1 つ目は出力のステータスを示し、2 つ目は受信信号の品質を示し、監視対象オブジェクトの機能予備を判断できます。
この場合、機能的予備力は、発光器から受光器が受け取る光束と、すでに動作を引き起こしている最小値との比を特徴付けます。機能予備は、光学部品の汚染や周囲の妨害エアロゾル粒子による信号の減衰を補償します。
例えば:
- インジケーターが赤色に点灯します。これは、追跡されたオブジェクトがトリガー ゾーンに存在することを意味します。
- 黄色の光 — 受け取った光束の強度が減少します。
- 緑 - 受け取った光束の強度は最小限です。
- オフ — オブジェクトはセンサーの作業領域にありません。
動作原理によれば、光学センサーには次の 3 つのタイプがあります。
バリア(タイプT)
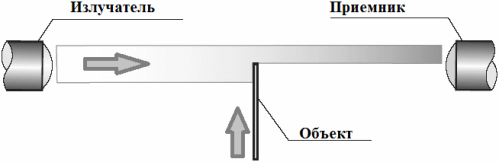
バリアタイプの光スイッチは直接ビームで動作し、トランスミッターとレシーバーという 2 つの別個の部品を含みます。エミッター (トランスミッター) から放出された放射束が指向性を持ってレシーバーに正確に当たるように、これらの部品は互いに同軸上に対向して配置する必要があります。
ビームが物体によって遮られると、スイッチが作動します。このタイプのセンサーは、送信機と受信機の間の数十メートルの距離でも動作でき、さらに、優れた遮音性があり、ほこりや一滴の液体などを恐れません。
しかし、デメリットもあります。
- 場合によっては、長距離の 2 つの部分のそれぞれに別々に電源線を敷設する必要があります。
- 反射率の高い物体は誤警報を引き起こす可能性があります。
- 透明な物体はビームを十分に弱めない可能性があるため、これを考慮する必要があります。
感度調整器は、これらの欠点を許容範囲内で解消するために使用されます。そしてもちろん、検出される物体の最小サイズはビームの直径より小さくてはなりません。
ディフューズ (タイプ D)
拡散センサーは、物体から反射されたビーム、つまり鏡面反射を使用します。受信機と送信機は 1 つのハウジング内にあります。エミッターは流れを物体に向け、ビームは物体の光学特性に応じてその表面からさまざまな方向に反射されます。フローの一部は受信機によって受信され、スイッチが作動する場所に戻ります。
ここで、誤警報は、設備の作業領域の後ろ、制御対象物の後ろにある反射物体によって引き起こされる可能性があることを考慮することが重要です。このような混信を排除するために、バックグラウンド抑制機能を備えたスイッチが使用されます。
拡散センサーが作動する距離を標準化するには、白い紙 (検出距離が 40 cm までの場合は 10 x 10 cm、検出距離が 40 cm を超える場合は 20 x 20 cm) または熱間圧延鋼板を用意します。同様の条件でテストします…一般に、異なる業界で、異なる方法でテストします。
より正確な正規化のために、さまざまな材料の反射特性を反映する特別なテーブルに従って距離が再計算されるため、補正係数が追加されます。たとえば、センサーの値は 100mm ですが、たとえばステンレス鋼の物体を監視したいとします。
補正係数は 7.5 になります。これは、安全な作動距離が 7.5 倍、つまり 750 mm になることを意味します。オブジェクトの最小サイズは、その反射特性、コントラスト、機能的予備力によって決まります。
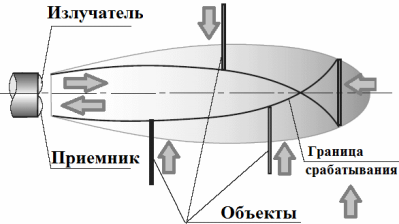
リフレックス(タイプR)
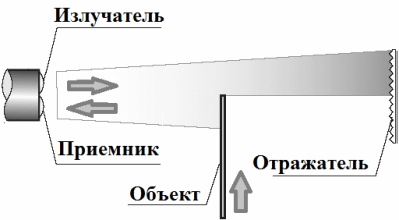
ここではリフレクターによる反射光を利用します。 1 つのハウジング内にエミッターを備えたレシーバーで、リフレクターに当たるビームが反射され、レシーバーに当たりトリガーされます。オブジェクトが作業領域を離れると、別のトリガーが発生します。このタイプのセンサーは、最大 10 メートルの距離で動作でき、半透明の物体の固定に使用されます。